








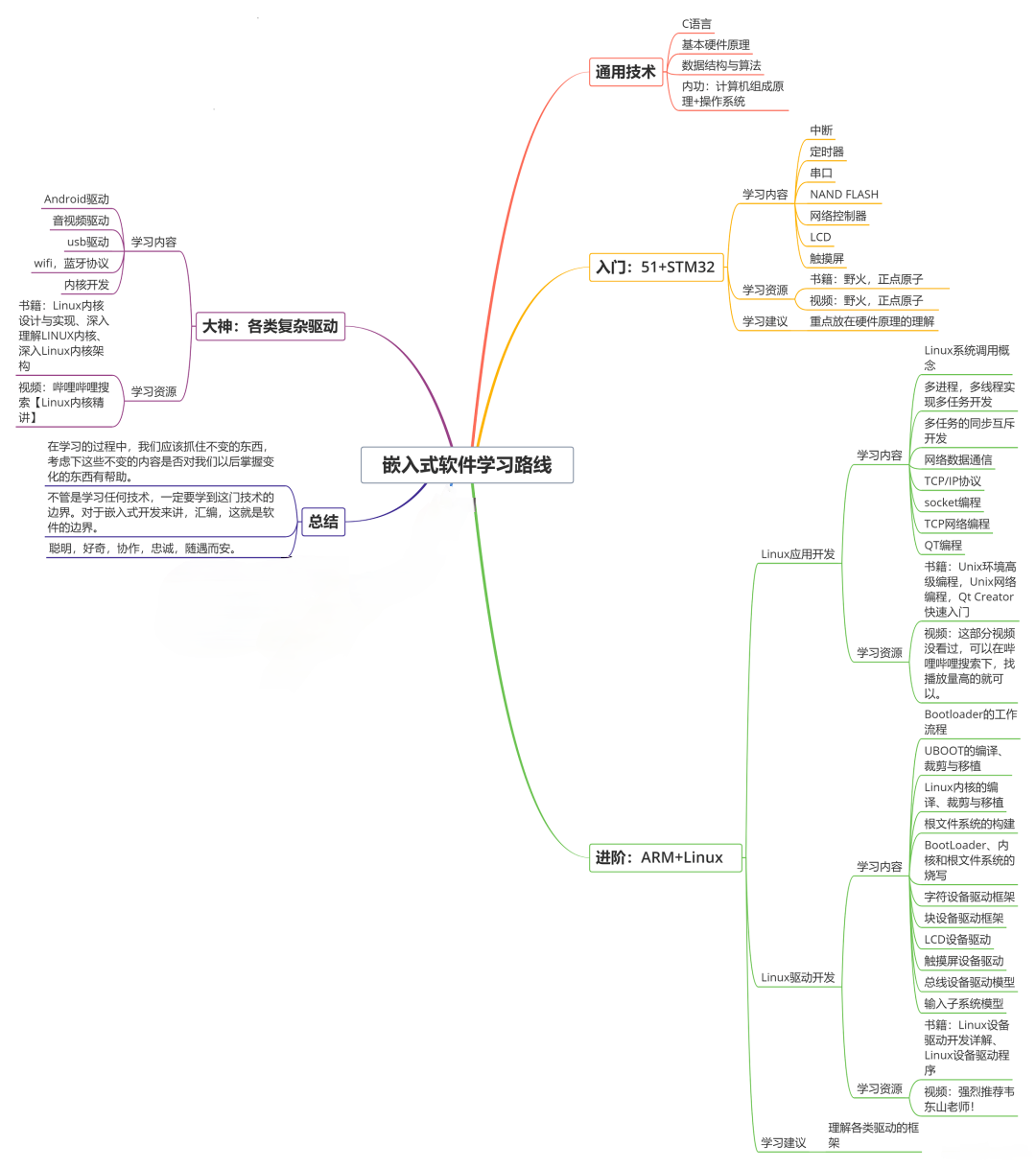
既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上物联网嵌入式知识点,真正体系化!
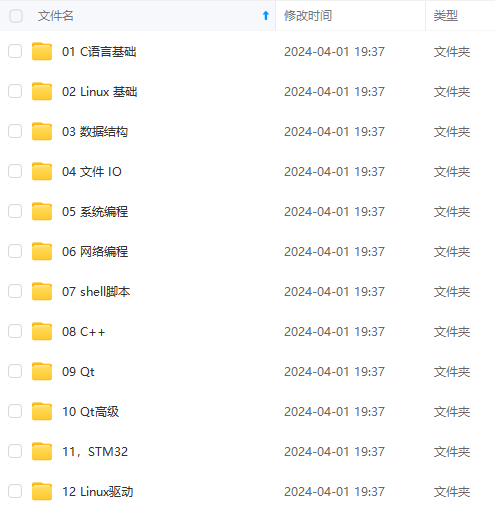
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、电子书籍、讲解视频,并且后续会持续更新
而我们通常说的九轴的含义是在主I2C接口,接上磁力传感器,即是九轴数据。
我们直接得到的是加速度计(测出加速度)和陀螺仪(测出角速度),我们实际使用的是姿态角,分别为俯仰角(pitch)、偏航角(yaw)和横滚角(roll)。这之间需要借助MPU6050的DMP模块把原始数据转换为四元数,然后四元数可以直接通过公式转化为姿态角。
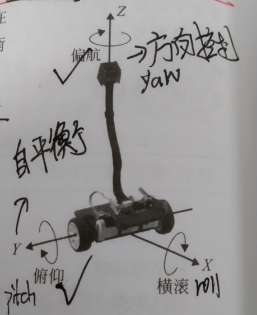
俯仰(pitch) - x轴
翻滚(roll) - y轴
偏航(yaw) - z轴
二、引脚接线图

三、需要注意的AD0
MPU6050作为一个IIC从机设备的时候,有8位地址,高7位的地址是固定的,就是WHOAMI寄存器的默认——0x68,最低的一位是由AD0的连线决定的。
AD0接GND时候,高8位的最后一位是0 所以整个iic从几地址就是0x68
AD0接VCC时候,高8位的最后一位是1 所以整个iic从几地址就是0x69
四、程序里需要知道的
程序都设置了INT平时为高电平,同时INT引脚为PB5,低电平触发中断。
MPU6050.C中的#define DEFAULT_MPU_HZ (200)
200Hz表示这个是fifo更新速率,而INT中断就是fifo更新的时候触发中断,即5ms来一次中断(1/200=0.005)。
其实正点原子的和平衡车之家的程序都设置了INT平时为高电平,平衡车之家没有关闭中断,并且设置了INT引脚为B5 低电平触发中断。而正点原子的直接在mpu6050初始化的时候就关闭了中断。
收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
业的老鸟或是对IT行业感兴趣的新人**
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









