






注意:MPU6050通讯代码配置属于IIC,详解请 参考主页IIC详解
中断系统
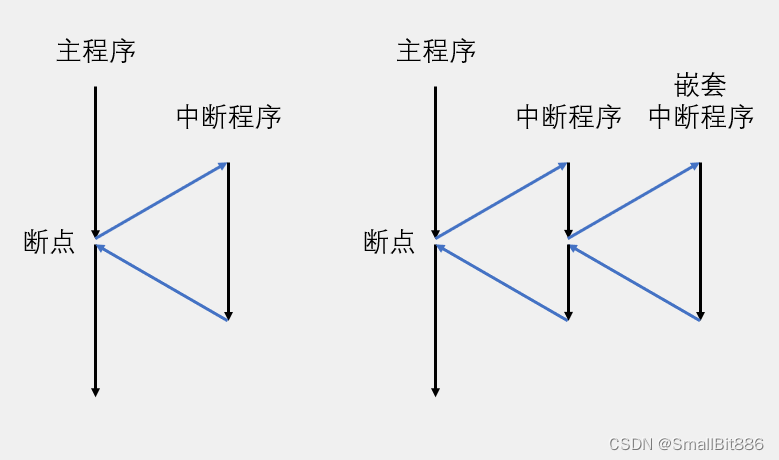
1.中断:在主程序运行过程中,出现了特定的中断触发条件(中断源),使得CPU暂停当前正在运行的程序,转而去处理中断程序,处理完成后又返回原来被暂停的位置继续运行
2.中断优先级:当有多个中断源同时申请中断时,CPU会根据中断源的轻重缓急进行裁决,优先响应更加紧急的中断源
3.中断嵌套:当一个中断程序正在运行时,又有新的更高优先级的中断源申请中断,CPU再次暂停当前中断程序,转而去处理新的中断程序,处理完成后依次进行返回
中断执行流程
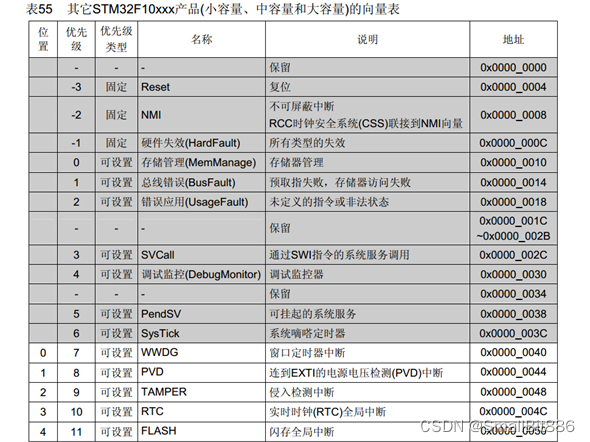
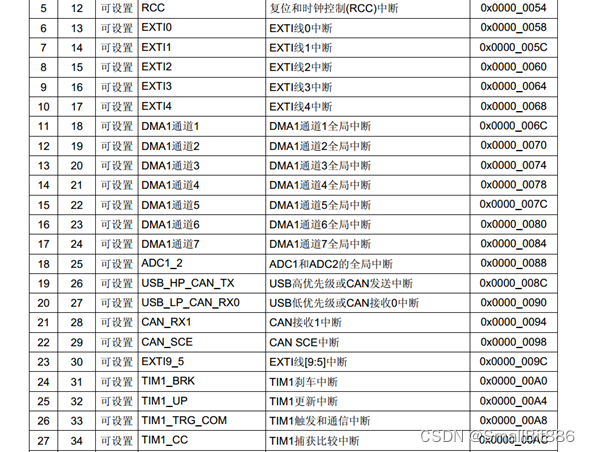
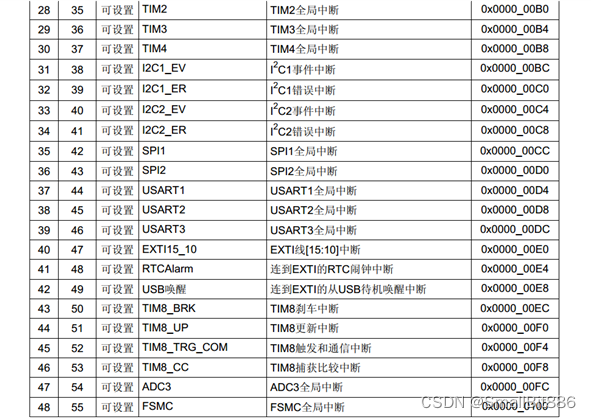
STM32中断
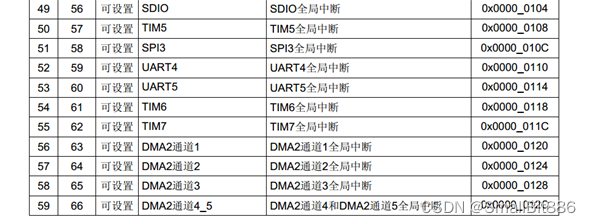
1.68个可屏蔽中断通道,包含EXTI、TIM、ADC、USART、SPI、I2C、RTC等多个外设
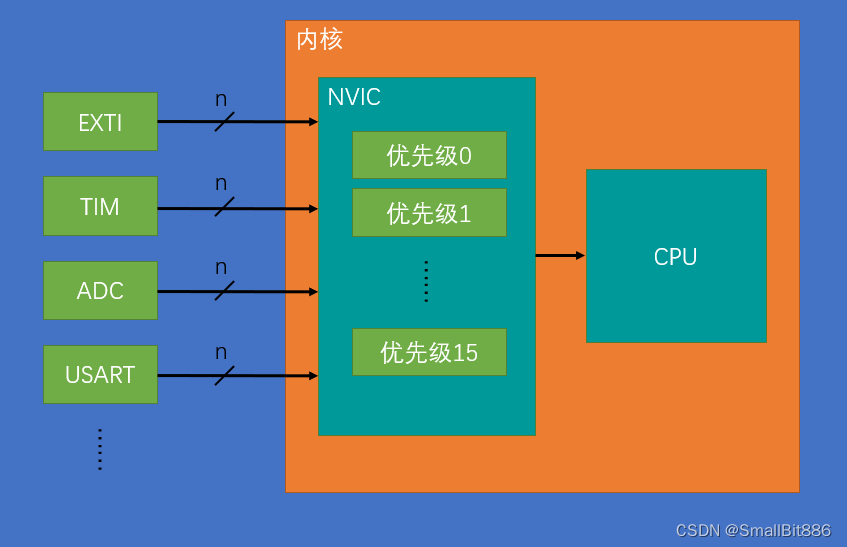
2.使用NVIC统一管理中断,每个中断通道都拥有16个可编程的优先等级,可对优先级进行分组,进一步设置抢占优先级和响应优先级
NVIC基本结构
NVIC中断优先级分组
1.使用NVIC统一管理中断,每个中断通道都拥有16个可编程的优先等级,可对优先级进行分组,进一步设置抢占优先级和响应优先级
2.NVIC的中断优先级由优先级寄存器的4位(0~15)决定,这4位可以进行切分,分为高n位的抢占优先级和低4-n位的响应优先级
3.抢占优先级高的可以中断嵌套,响应优先级高的可以优先排队,抢占优先级和响应优先级均相同的按中断号排队

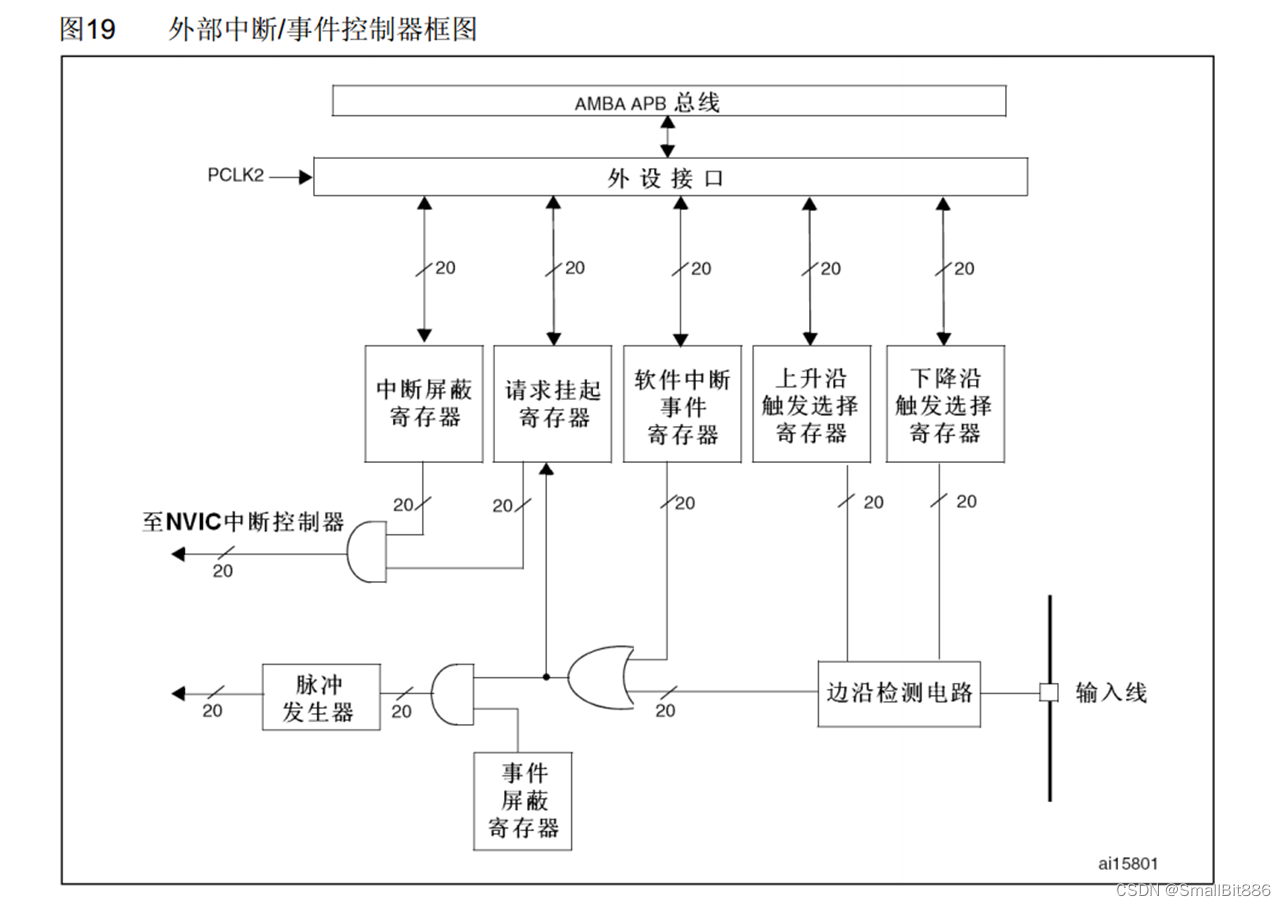
EXTI简介
1.EXTI(Extern Interrupt)外部中断
2.EXTI可以监测指定GPIO口的电平信号,当其指定的GPIO口产生电平变化时,EXTI将立即向NVIC发出中断申请,经过NVIC裁决后即可中断CPU主程序,使CPU执行EXTI对应的中断程序
3.支持的触发方式:上升沿/下降沿/双边沿/软件触发
4.支持的GPIO口:所有GPIO口,但相同的Pin不能同时触发中断
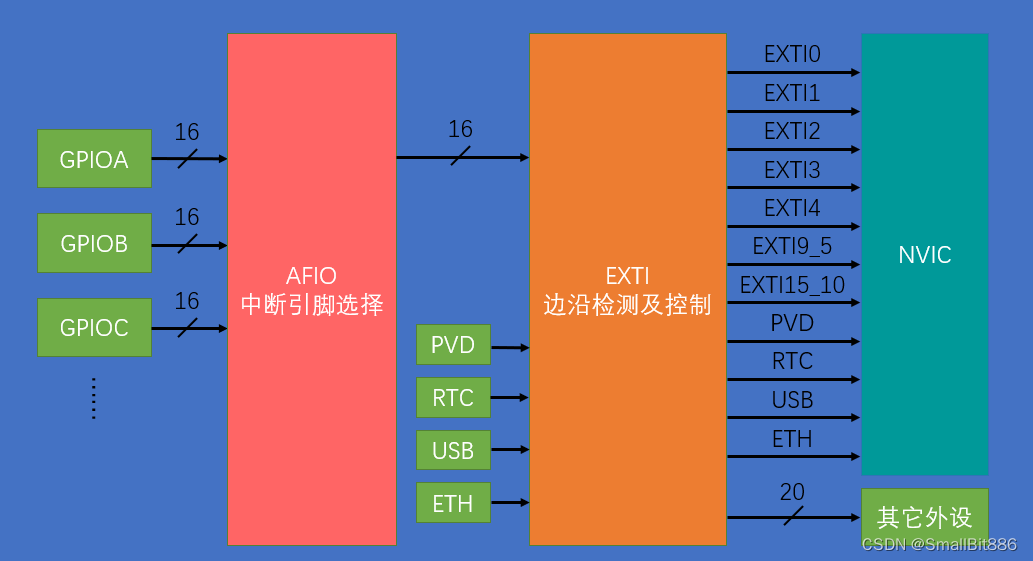
5.通道数:16个GPIO_Pin,外加PVD输出、RTC闹钟、USB唤醒、以太网唤醒
6.触发响应方式:中断响应/事件响应
外部中断基本结构
AFIO复用IO口
1.AFIO主要用于引脚复用功能的选择和重定义
2.在STM32中,AFIO主要完成两个任务:复用功能引脚重映射、中断引脚选择
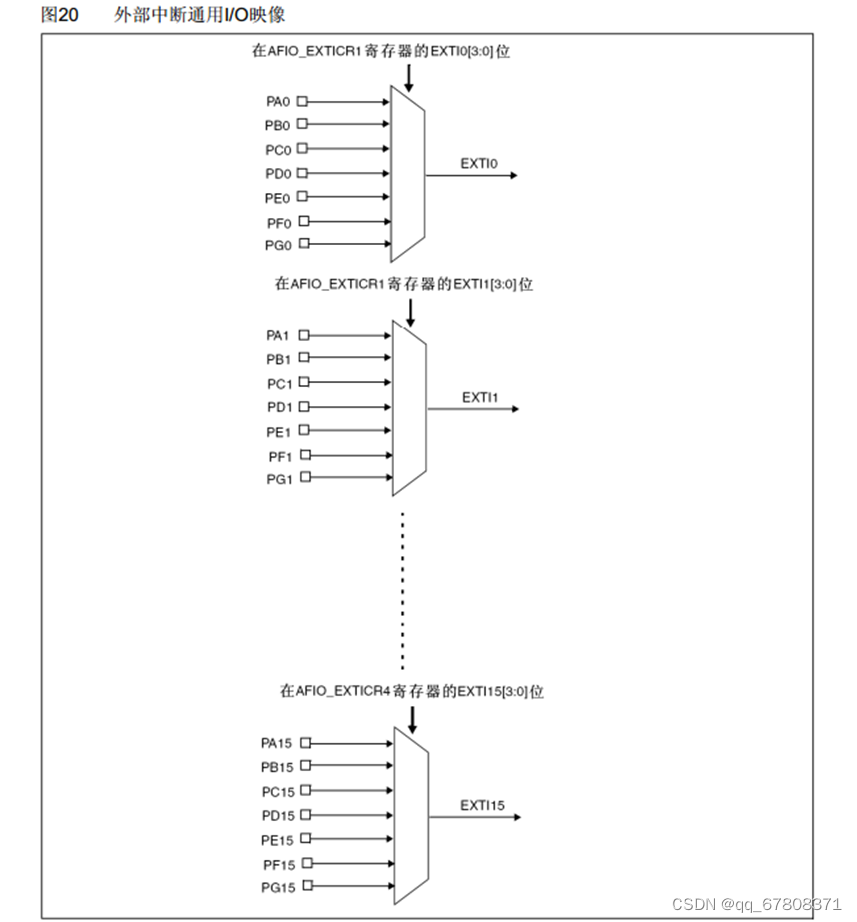
外部中断框图
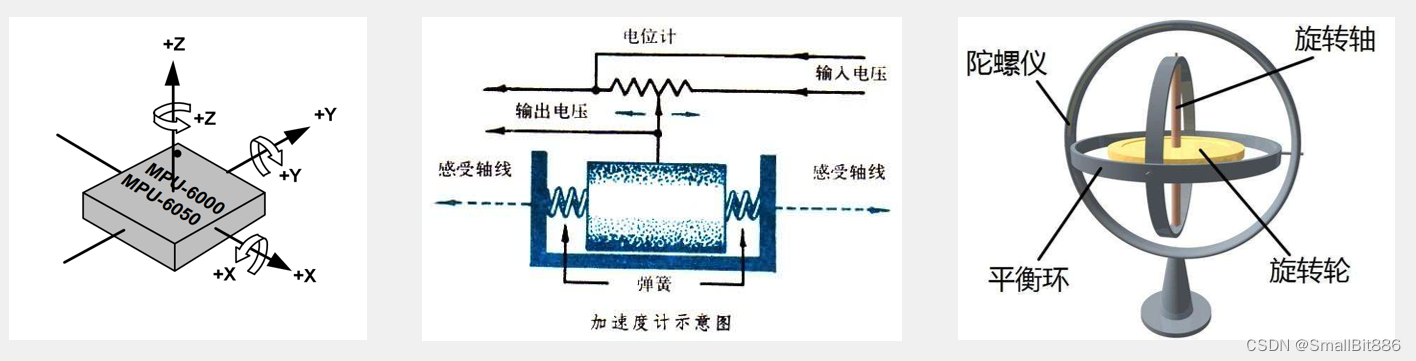
MPU6050简介
MPU6050是一个6轴姿态传感器,可以测量芯片自身X、Y、Z轴的加速度、角速度参数,通过数据融合,可进一步得到姿态角,常应用于平衡车、飞行器等需要检测自身姿态的场景
3轴加速度计(Accelerometer):测量X、Y、Z轴的加速度
3轴陀螺仪传感器(Gyroscope):测量X、Y、Z轴的角速度
MPU6050参数
16位ADC采集传感器的模拟信号,量化范围:-32768~32767
加速度计满量程选择:±2、±4、±8、±16(g)
陀螺仪满量程选择: ±250、±500、±1000、±2000(°/sec)
可配置的数字低通滤波器
可配置的时钟源
可配置的采样分频
I2C从机地址:1101000(AD0=0)
1101001(AD0=1)
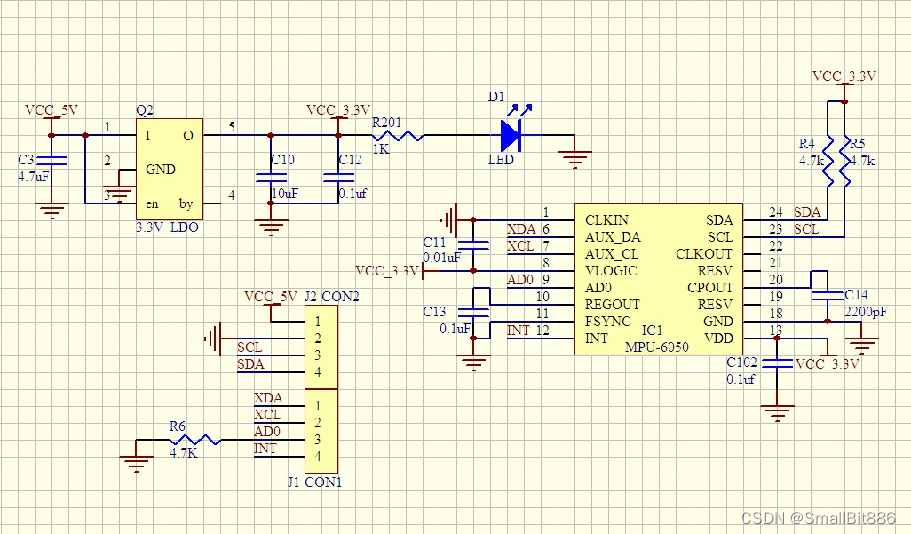
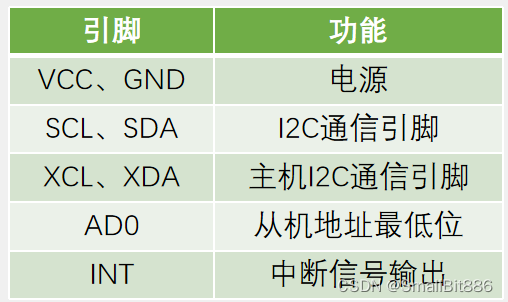
MPU6050硬件电路
MPU6050框图
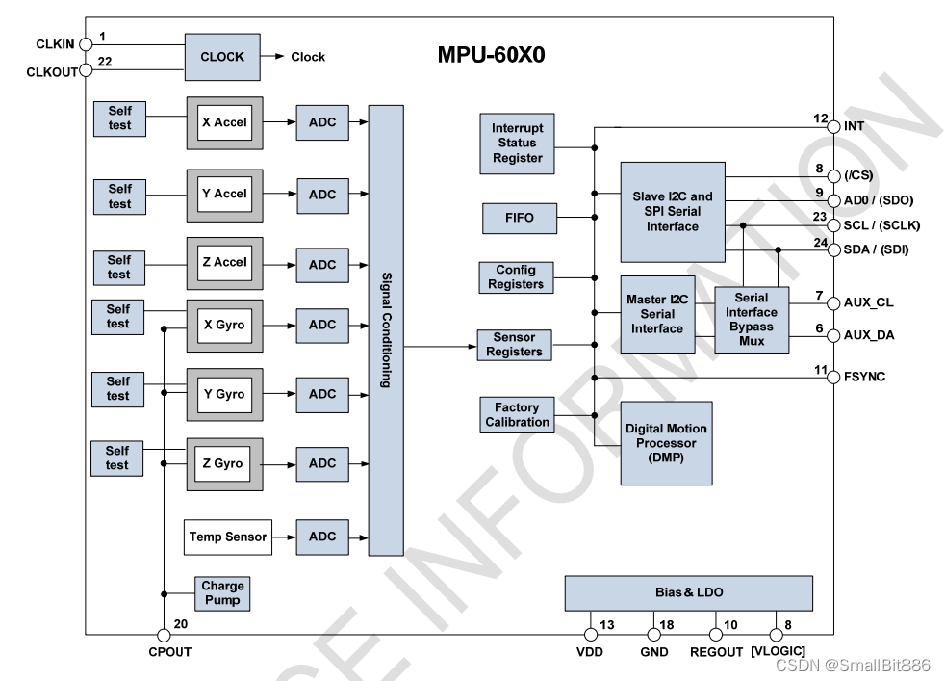
MPU6050代码配置
exti.c
#include "Exti.h"
/**
* @brief MPU6050外部中断引脚
* @param
* @retval
* @attention RCC_APB2Periph_AFIO开启复用时钟,复用为外部中断
*/
void MPU6050_EXTI_Init(void)
{
EXTI_InitTypeDef EXTI_InitStructure;
GPIO_InitTypeDef GPIO_InitStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//开启时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//开启时钟
GPIO_InitStruct.GPIO_Mode=GPIO_Mode_IPU;//上拉模式
GPIO_InitStruct.GPIO_Pin=GPIO_Pin_5;//PB5配置为上拉输入
GPIO_InitStruct.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&GPIO_InitStruct);
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB , GPIO_PinSource5);//将GPIO口配置成外部中断
EXTI_InitStructure.EXTI_Line = EXTI_Line5;//将对应的GPIO口连接到中断线上
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;//中断事件类型,下降沿
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;//选择模式,中断型
EXTI_InitStructure.EXTI_LineCmd = ENABLE;//使能该中断
EXTI_Init(&EXTI_InitStructure);//将配置好的参数写入寄存器
}
exti.h
#ifndef __EXTI_H
#define __EXTI_H
#include "sys.h"
void MPU6050_EXTI_Init(void);
#endif
NVIC.c
/**
* @brief 中断优先级
* @param
* @retval
* @attention 配置MPU6050外部中断为最高,因为要时刻采集数据维持平衡车
*/
void NVIC_Config(void)
{
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//4级抢占,4级响应。
//配置MPU6050外部中断
NVIC_InitStruct.NVIC_IRQChannel=EXTI9_5_IRQn;//中断通道
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;//使能该通道中断
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=0;//主优先级0,最高
NVIC_InitStruct.NVIC_IRQChannelSubPriority=0;//子优先级,最高
NVIC_Init(&NVIC_InitStruct);//初始化
//配置串口中断
NVIC_InitStruct.NVIC_IRQChannel=USART1_IRQn;//串口中断
NVIC_InitStruct.NVIC_IRQChannelCmd=ENABLE;//使能该通道中断
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority=2;//主优先级2
NVIC_InitStruct.NVIC_IRQChannelSubPriority=2;//子优先级2
NVIC_Init(&NVIC_InitStruct); //初始化
}
剩余代码过长,已经上传到git仓库,需要的自取
https://github.com/SmallBit886/MPU6050

















 12万+
12万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











