









为了检测车辆非法占用应急停车道,不管是在应急车道上停车还是行驶,普通车辆都是不允许的,那么这个检测的逻辑流程是什么呢?
首先我们肯定需要去进行车辆检测和车辆跟踪,才知道是同一辆车,因为无人机巡航飞行,背景是运动的,所以检测算法用的多的有ViBe和CNN中的SSD,YOLO等,跟踪算法有camshift,meanshift,Kalman滤波器,这里再分析选择哪一个。
之后需要进行车道线检测,才能判断哪里是应急车道,常用的车道线检测有:Hough变换,漫水填充识别车道,还有CNN去搞。
判断车辆是否在应急车道内,这个还没想好,可以用像素点阈值之差?
一篇专利上是写了先用漫水填充识别白线两端的应急车道,再用显著性分析识别车道中的像素变化,从而获得车道内有车辆的信息。
或者先通过canny,hough变化得到车道线,以所检测到的车辆的质心距车道线的位置来判断车辆是否在应急车道内。
车辆尾部两侧检查尾灯的位置,第一种可以用Sobel算子找到车尾的矩形,在利用一次sobel算子计算得到尾灯位置;第二种是HSV颜色空间分割和RGB模型地融合,如果是运动情况,尾灯可能还要进行跟踪,这里用Kalman滤波器就可以了。
而我们不仅要判断车尾灯的位置,还要看是否是亮的黄灯,这里用H,S,V的分量直方图去反映是否亮黄灯。
假设t’时刻亮的是黄灯,那么根据 https://blog.csdn.net/u010712012/article/details/84454590
上次写的思路来检测下一个或两个时刻的时候是否还亮着黄灯,这个频率间隔设为
t
2
\frac{t}{2}
2t(假设亮灯时间为t),没亮就说明是双闪灯,或者再来循环一下以确定不是司机关掉了。如果亮了说明不是双闪灯,为非法占用应急车道,进而需要识别车牌。
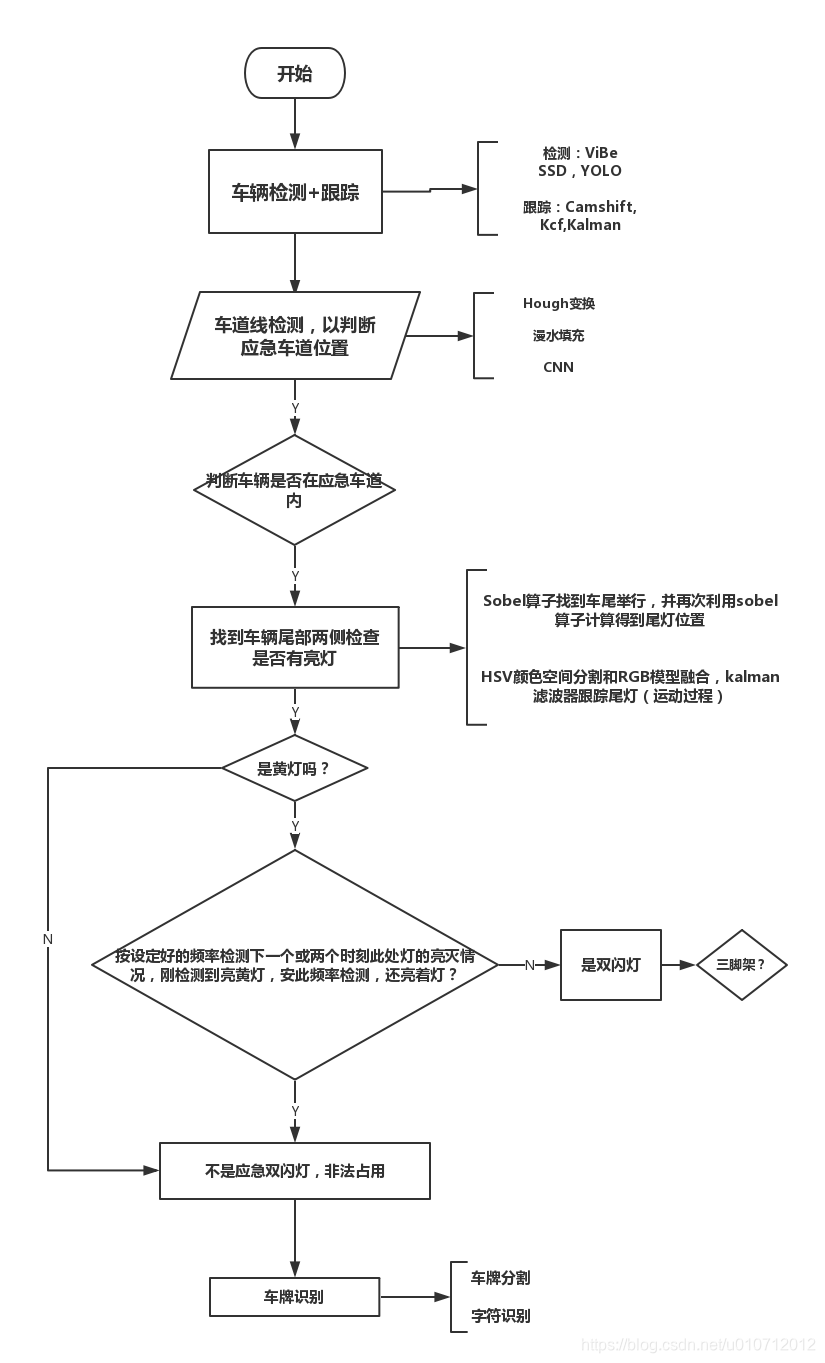
以上是流程图,下次进行细致分模块进行分析。

















 2723
2723

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









