








前言:
趁手头有块820板子(MSM8096)和一个摄像头(信利16021),就自己尝试bring up一下camera了,之前也没弄过摄像头方面的东西额,纯粹是操作一步记录一步的方式额,不喜勿喷,仅当参考。先百度下camera原理:外部光线穿过lens后,经过color filter滤波后照射到sensor面上,sensor将从lens上传到过来的光线转换成电信号,再通过内部的AD转换为数字信号,如果sensor没有集成DSP,则通过DVP的方式传输到baseband,此时的数据格式是RAW DATA。必须通过平台的isp来处理。如果集成了DSP,这RAW DATA数据经过AWB,color matrix,lens shading,gamma,sharpness,AE和de-noise处理后输出YUV或者RGB格式的数据。最后会由CPU送到framebuffer中进行显示。
一、前期准备:
在硬件上:
(1)首先对照模组是否和手中sensor的module相匹配。
(2)对照原理图和camera datasheet,检查camera module 的pin脚连接是否正确。
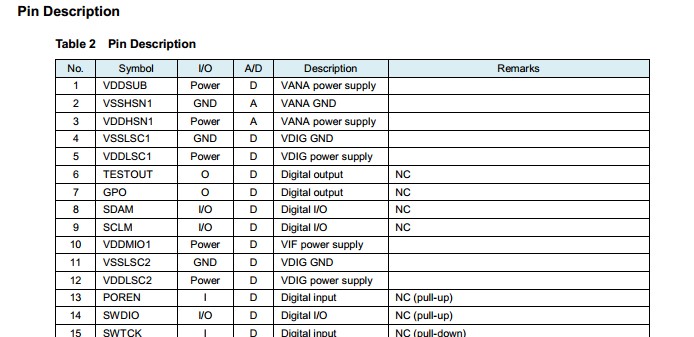
(3)供电确认,用万用表测量Camera的电源管脚,查看Camera的供电是否正常,模组端所需电压和board所供电压是否一致
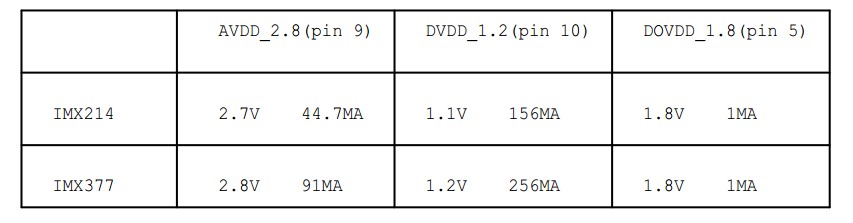
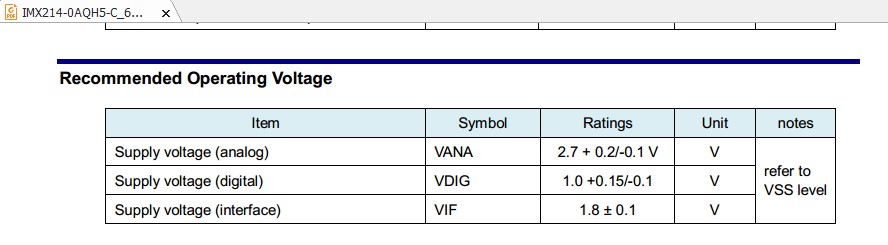
AVDD模拟电路电源:2.7V,正常情况下,需要单独供电减少其他干扰(电源纹波不大于30mv);
DOVDD、VIF:1.8V
DVDD数字电路供电电源 :1.1V
(4)用示波器量Camera的MCLK管脚,看是否正确,如果MCLK正常,通常情况下PCLK也应该有波形;

MCLK 为camera提供时钟,给模组内部的pll使用。qualcomm平台一般是24MHZ。
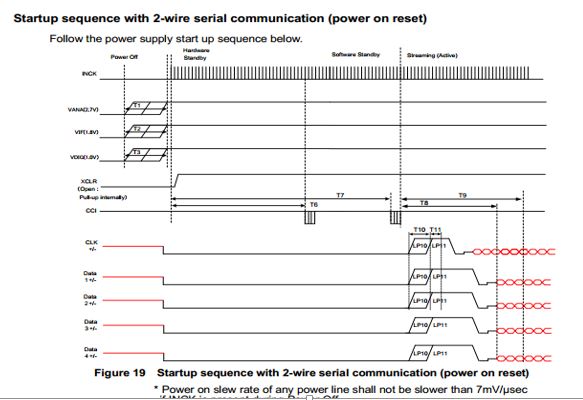
(5)查看Camera的Spec文档,检查PWDN和RESET的管脚触发是否正常;检查代码中camera power up时序是否与datasheet的一致。
RESET/XSHUTDOWN/XCLR:用来reset sensor;RESET一般是低有效,当脉冲为低时,reset sensor,而正常工作时,应该为高。注意reset的时间要求
。
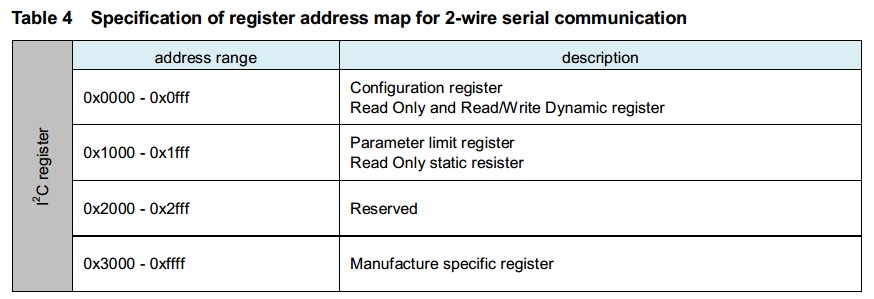
(6)在Camera的Datasheet中找出该设备的I2C地址,检查I2C配置是否正确;查看I2C通信是否正常,是否能正常进行读写,用示波器量出I2C的SCL和SDA的波形是否正常,未通信时都为高电平,通信时SCL为I2C时钟信号,SDA为I2C数据通路信号;
(7)假如自己对camera寄存器列表配置不明确,可以让Sensor FAE检查Camera的寄存器列表的配置是否正确,其实我之前配置的时候一直在琢磨着修改相应的dtsi文件(如:msm8996-camera-sensor-adp.dtsi),后面听同事说不需要改这些了,说msm8996的已经配置好了的,有时间再研究研究,下面就copy一下别人是怎么配置的以及跟踪一下这个dts的实际配置情况吧,让大家更直观的看到吧。
(先写到这里,待会晚上有时间载添加kernel中修改的文件以及vendor中需要配置的文件咯)
二、kernel部分
(1) vim kernel/driver/media/platform/msm/camera_v2/sensor
添加sensor驱动文件-可参考其他
修改Makefile
(2) kernel/arch/arm/configs
添加CONFIG_定义
(3)kernel/driver/media/platform/msm/camera_v2/kconfig
添加选项
(4) 设备树文件kernel/arch/arm/boot/dts/qcom/_camera*.dtsi
添加新的条目
gpio set
clk set
power set
i2c slave
三、vendor部分
(1) mm-camera2/media-controller/modules/sensors/sensor_libs/
添加lib文件
(2)vendor/qcom/proprietary/common/config/device-vendor.mk
加入新的条目
(3)
a、sensor init parameter
2D/3D、前/后置、安装角度
b、sensor output
bayer/yuv、mipi/并口、位数
c、output size
static struct sensor_lib_out_info_t sensor_out_info[] = {
{
.x_output = 4208,
.y_output = 3120,
.line_length_pclk = 4572,
.frame_length_lines = 3142,
.vt_pixel_clk = 360000000,
12/26例如
.op_pixel_clk = 360000000,
.binning_factor = 1,
.max_fps = 24.01,
.min_fps = 7.5,
.mode = SENSOR_DEFAULT_MODE,
},
x_output –
sensor 输出有效宽度
y_output – sensor 输出有效高度
line_length_pclk –包含 blanking 的宽度值
frame_length_lines –包含 blanking 的高度值
vt_pixel_clk(video timing clk value) –该虚拟时钟值用于曝光时间计算,用于 AEC算法
的 banding artifacts 纠正,vt_pixel_clk 的计算如下:
vt_pixel_clk = line_length_pclk * frame_length_lines * framerate
op_pixel_clk – VFE 时钟,表示每秒 VFE 处理的数据量(in pixel)。
op_pixel_clk = (sensor 输出实际比特率)/bits-per-pixel
比如,如果 MIPI DDR时钟值(sensor MIPI 的时钟 lane 频率) 为 300Mhz, 同时sensor 使用 4 个 lane (一组差分信号属于一个lane)传输数据, 每一个 lane 的数据率是 300*2 =600Mhz. 因此, 总数据率为 600*4= 2400Mhz. 对于 10bit 的 bayer sensor, op_pixel_clk 值可设置为2400/10 =240Mhz.这些值可以从 sensor 的寄存器设置中计算出来。
d、chromatix
e、register addr
f、mipi receiver
g、regiseter setting
————————————————
版权声明:本文为CSDN博主「Winston_Jory」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weijory/article/details/53811140















 643
643











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









