







写在前面
本课程是NPTEL有关轮式移动机器人的开放课程。本课程将移动机器人限制在轮式配置,通过本门课程能够理解移动机器人从基本概念到最终原型的整体思路。
本课程整体结构是,首先介绍运动,然后介绍传感导航,最后将回归到控制。
L1 移动机器人和机械臂简介
本节是该课程的第一讲,主要是对移动机器人和机械臂的简介。
1.1 本讲的主要内容
- LECTURE 1: Introduction to Mobile Robots and Manipulators
- 1 Introduction
- Effector
- Themes of robotsics
- 2 Mobile Robots
- Basic questions
- Components of a mobile robot
- 1 Introduction
我们首先从效应器(Effector)的角度来看一下什么是机器人。首先,什么是效应器?
效应器:在机器人学中,效应器(Effector)是指机器人用于执行物理操作或控制环境的部件或装置。它们是机器人与外部世界之间的接口,使机器人能够产生实际的影响和交互。效应器可以是机器人的机械部件,如机械臂、手指或腿部,用于从事精确的操作和动作。效应器还可以是涉及机器人移动的部件,如轮子、履带或腿部关节。此外,还可以包括其他类型的装置,如传感器控制开关、灯光或音响系统。效应器通常通过机器人的控制系统或控制算法进行控制。它们接收来自机器人的控制信号,并将其转化为实际动作或影响。例如,机器人的机械手臂效应器可以接收坐标和角度信息,以准确地抓取、放置或操纵物体。
- Effector
- An effector is any robot or robotic device that has effect on the environment.
在这里,我们将机器人笼统的称为效应器(Effector)。
效应器大致可以分为两类:
- (1) Locomotion
- if the effect on the environment causes motion of the effector itself.
- example: Mobile robot
第一类是基于环境的影响,导致自身的移动。环境的影响或对环境的影响导致效应器(Effector)自身的移动,我们将这种特殊的移动称为运动(Locomotion)。比如移动机器人。
- (2)Manipulation
- if the effect on the environment causes motion of the objects around.
- example: Robotic manipulator
第二类是对环境的影响,导致周围物体的移动,而非自身的移动。这就是Manipulation(操纵),也就是所谓的机械臂。
这里谈一下Controler(控制器): 通过效应器的定义中,我们也可以看出,控制器并不是效应器也不是效应器的一部分,它只是效应器的一个辅助工具,用于让效应器达到预期的效果。
1.2 Effector

前面我们将Effector分为两类:Manipulators 与 Mobile Robots.我们来看一下这两者的区别:
| 类型 | 工作空间 | 空间位置 | 外界环境感知 |
|---|---|---|---|
| Mobile Robots | 确定 | 能够获取绝对测量值 | 可不感知外界环境 |
| Manipulators | 非确定 | 需靠外界多传感器感知确定位置 | 需感知周围环境,并避障 |
1.3 移动机器人简介
所谓移动机器人:
- 一个简单的定义就是
能够进行移动的自动机器。 - 有能力在特定环境中移动,且不固定在一个位置;
- 包括轮式、腿式、履带式、飞行、游动等多种形式,涉及技术广泛。本课程将移动机器人限定在轮式移动机器人。
1.4 移动机器人三个基本问题
三个基本问题:
- Where am I ? ——> 自我定位
- Where am I going ? ——> 目标是什么
- How do I get there ?——> 怎么做
为回答这三个基本问题,机器人首先要做的事:
- 感知环境
- 自我定位
- 路径规划和动作执行
上述内容也是本门课程主要解决的问题。
1.5 移动机器人学四大支柱

(1)机械系统:机器人实际与机械系统一起出现的,机器人中机械结构包括移动平台、臂或其它结构,能够与其环境交互;
(2)传感、感知和定位绘图:感知所处的环境,并向设备提供有用的反馈;
(3)导航和运动规划:规划导航路线;
(4)电机控制和任务执行:运动控制。
1.6 移动机器人组成
移动机器人由硬件、软件两部分组成,硬件相当于移动机器人的身体,软件(导航和控制)则相当于移动机器人的大脑。一个完整的移动机器人包括:
- 运动系统:机器人怎样在所处的环境中运动;
- 感知系统:获取自身属性和环境属性;
- 推理系统:生成地图,并采取进一步的行动;
- 控制系统:如何执行计划运动;
- 通信系统:与外部操控者通信。
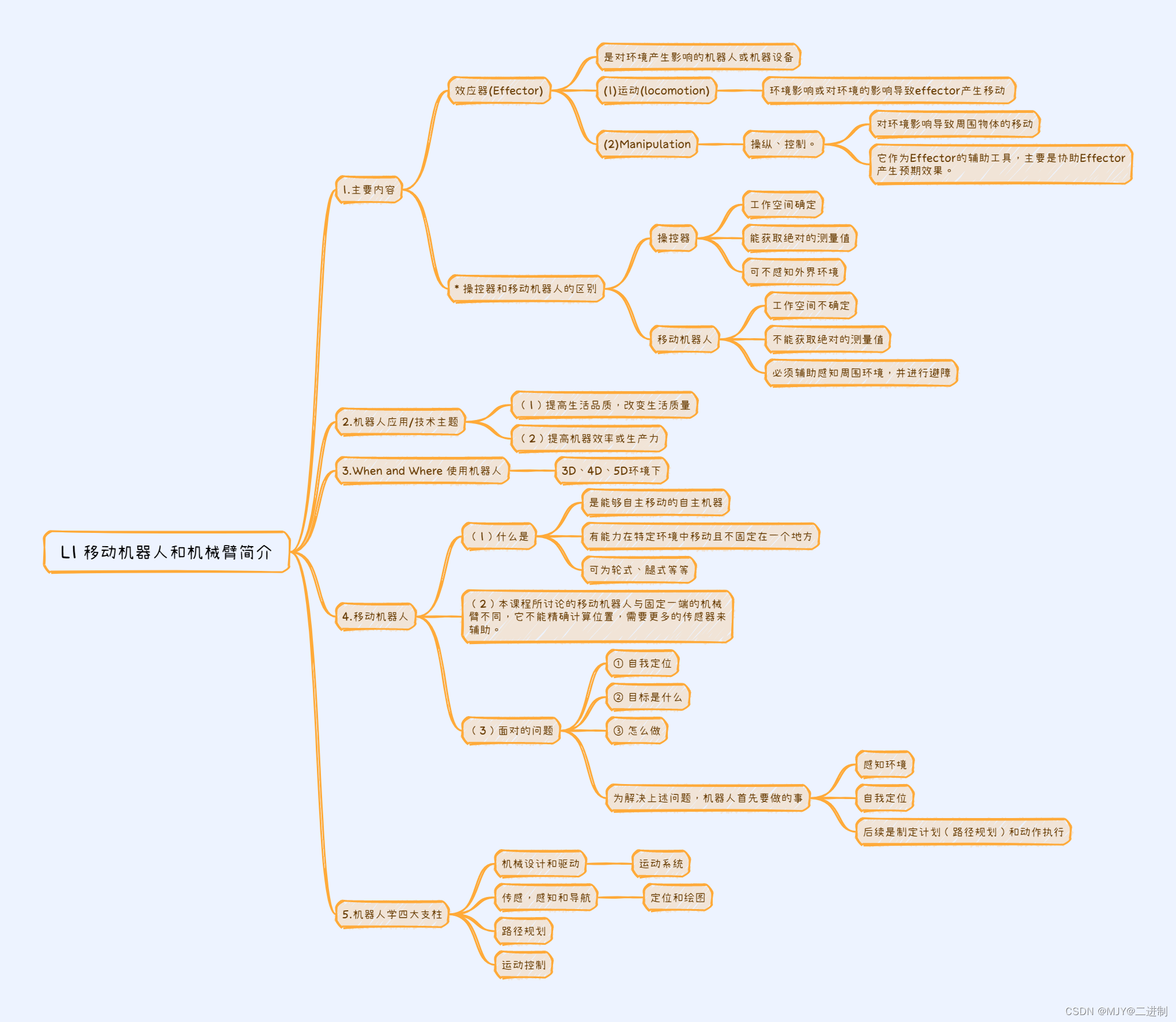
附:本课程思维导图




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











