







void Sharpen(const Mat& myImage, Mat& Result)
{
CV_Assert( myImage.depth() != sizeof(uchar));
Result.create(myImage.size(), myImage.type());
const int nChannels = myImage.channels();
for(int j = 1; j < myImage.rows -1 ; ++j)
{
const uchar* previous = myImage.ptr<uchar>(j-1);
const uchar* current = myImage.ptr<uchar>(j);
const uchar* next = myImage.ptr<uchar>(j+1);
uchar* output = Result.ptr<uchar>(j);
for(int i = nChannels; i < nChannels * (myImage.cols -1); ++i)
{
*output++ = saturate_cast<uchar>(5 * current[i] - current[ i- nChannels] - current[i + nChannels] - previous[i] - next[i]);
}
}
Result.row(0).setTo(Scalar(0));
Result.row(Result.rows -1).setTo(Scalar(0));
Result.col(0).setTo(Scalar(0));
Result.col(Result.cols -1).setTo(Scalar(0));
}
void main1(void)
{
Mat image;
Mat out_image;
Mat out_image_filter2D;
double t[2];
image = imread("YY01.jpg",CV_LOAD_IMAGE_COLOR);
t[0] = (double)getTickCount();
Sharpen(image,out_image);
t[0] = ((double)getTickCount() - t[0])/getTickFrequency();
imshow("Disp YY",image);
imshow("Disp Sharpen_YY",out_image);
Mat kern = (Mat_<char>(3,3)<<0,-1, 0,
-1, 5,-1,
0,-1, 0);
t[1] = (double)getTickCount();
filter2D(image,out_image_filter2D,image.depth(), kern);
t[1] = ((double)getTickCount() - t[1])/getTickFrequency();
imshow("Disp filter2D_YY",out_image); //show
cout<<"方法 【手工滤波器】—— Times passed in Second: "<<t[0]<<endl;
cout<<"方法 【filter2D 滤波器】—— Times passed in Second: "<<t[1]<<endl;
waitKey(0);
}
经过OpenCV优化的滤波器速度,明显提高了一个数量级!

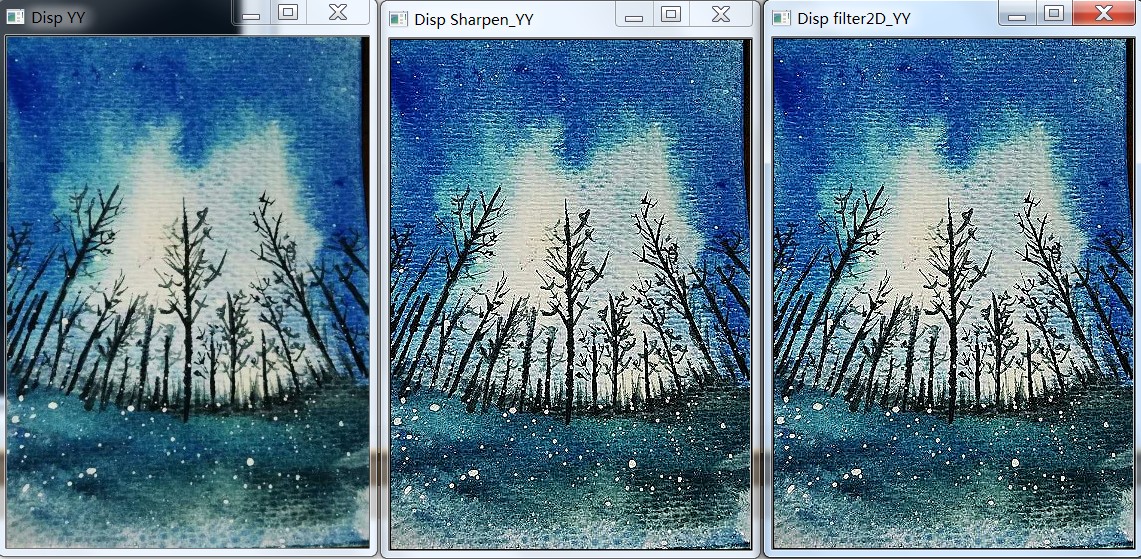
滤波器功能: 图像锐化


















 3008
3008

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









