







本系列文章由@浅墨_毛星云 出品,转载请注明出处。
文章链接: http://blog.csdn.net/poem_qianmo/article/details/30974513
作者:毛星云(浅墨) 微博:http://weibo.com/u/1723155442
知乎:http://www.zhihu.com/people/mao-xing-yun
写作当前博文时配套使用的OpenCV版本: 2.4.9
本篇文章中,我们一起探讨了OpenCV中重映射和SURF特征点检测相关的知识点,主要一起了解OpenCV中重映射相关的函数remap,SURF算法在OpenCV中的体现与应用。此博文一共有三个配套的麻雀虽小但五脏俱全的示例程序,其经过浅墨详细注释过的代码都在文中贴出,且文章最后提供了综合示例程序的下载。
依然是先看看程序运行截图。
重映射:

SURF特征点检测:
一、OpenCV重映射
1.1 重映射的概念简析
重映射,就是把一幅图像中某位置的像素放置到另一个图片指定位置的过程。为了完成映射过程, 我们需要获得一些插值为非整数像素的坐标,因为源图像与目标图像的像素坐标不是一一对应的。一般情况下,我们通过重映射来表达每个像素的位置 (x,y),像这样 :
g(x,y) = f ( h(x,y) )
在这里, g( ) 是目标图像, f() 是源图像, 而h(x,y) 是作用于 (x,y) 的映射方法函数。
来看个例子。 若有一幅图像 I ,想满足下面的条件作重映射:
h(x,y) = (I.cols - x, y )
这样的话,图像会按照 x 轴方向发生翻转。那么,源图像和效果图分别如下:

在OpenCV中,我们用函数remap( )来实现简单重映射,下面我们就一起来看看这个函数。
1.2 remap( )函数解析
remap( )函数会根据我们指定的映射形式,将源图像进行重映射几何变换,基于的式子如下:
需要注意,此函数不支持就地(in-place)操作。看看其原型和参数。
- C++: void remap(InputArray src, OutputArraydst, InputArray map1, InputArray map2, int interpolation, intborderMode=BORDER_CONSTANT, const Scalar& borderValue=Scalar())


- 第一个参数,InputArray类型的src,输入图像,即源图像,填Mat类的对象即可,且需为单通道8位或者浮点型图像。
- 第二个参数,OutputArray类型的dst,函数调用后的运算结果存在这里,即这个参数用于存放函数调用后的输出结果,需和源图片有一样的尺寸和类型。
- 第三个参数,InputArray类型的map1,它有两种可能的表示对象。
- 表示点(x,y)的第一个映射。
- 表示CV_16SC2 , CV_32FC1 或CV_32FC2类型的X值。
- 第四个参数,InputArray类型的map2,同样,它也有两种可能的表示对象,而且他是根据map1来确定表示那种对象。
- 若map1表示点(x,y)时。这个参数不代表任何值。
- 表示CV_16UC1 , CV_32FC1类型的Y值(第二个值)。
- 第五个参数,int类型的interpolation,插值方式,之前的resize( )函数中有讲到,需要注意,resize( )函数中提到的INTER_AREA插值方式在这里是不支持的,所以可选的插值方式如下:
- INTER_NEAREST - 最近邻插值
- INTER_LINEAR – 双线性插值(默认值)
- INTER_CUBIC – 双三次样条插值(逾4×4像素邻域内的双三次插值)
- INTER_LANCZOS4 -Lanczos插值(逾8×8像素邻域的Lanczos插值)
- 第六个参数,int类型的borderMode,边界模式,有默认值BORDER_CONSTANT,表示目标图像中“离群点(outliers)”的像素值不会被此函数修改。
- 第七个参数,const Scalar&类型的borderValue,当有常数边界时使用的值,其有默认值Scalar( ),即默认值为0。
1.3 详细注释的重映射示例程序
下面放出精简后的以remap函数为核心的示例程序,方便大家快速掌握remap函数的使用方法。
- //-----------------------------------【程序说明】----------------------------------------------
- // 程序名称::《【OpenCV入门教程之十七】OpenCV重映射 & SURF特征点检测合辑 》 博文配套源码
- // 开发所用IDE版本:Visual Studio 2010
- // 开发所用OpenCV版本: 2.4.9
- // 2014年5月26日 Created by 浅墨
- // 配套博文链接: http://blog.csdn.net/poem_qianmo/article/details/26977557
- // PS:程序结合配合博文学习效果更佳
- // 浅墨的微博:@浅墨_毛星云 http://weibo.com/1723155442
- // 浅墨的知乎:http://www.zhihu.com/people/mao-xing-yun
- // 浅墨的豆瓣:http://www.douban.com/people/53426472/
- //----------------------------------------------------------------------------------------------
- //-----------------------------------【头文件包含部分】---------------------------------------
- // 描述:包含程序所依赖的头文件
- //----------------------------------------------------------------------------------------------
- #include "opencv2/highgui/highgui.hpp"
- #include "opencv2/imgproc/imgproc.hpp"
- #include <iostream>
- //-----------------------------------【命名空间声明部分】--------------------------------------
- // 描述:包含程序所使用的命名空间
- //-----------------------------------------------------------------------------------------------
- using namespace cv;
- //-----------------------------------【main( )函数】--------------------------------------------
- // 描述:控制台应用程序的入口函数,我们的程序从这里开始执行
- //-----------------------------------------------------------------------------------------------
- int main( )
- {
- //【0】变量定义
- Mat srcImage, dstImage;
- Mat map_x, map_y;
- //【1】载入原始图
- srcImage = imread( "1.jpg", 1 );
- if(!srcImage.data ) { printf("读取图片错误,请确定目录下是否有imread函数指定的图片存在~! \n"); return false; }
- imshow("原始图",srcImage);
- //【2】创建和原始图一样的效果图,x重映射图,y重映射图
- dstImage.create( srcImage.size(), srcImage.type() );
- map_x.create( srcImage.size(), CV_32FC1 );
- map_y.create( srcImage.size(), CV_32FC1 );
- //【3】双层循环,遍历每一个像素点,改变map_x & map_y的值
- for( int j = 0; j < srcImage.rows;j++)
- {
- for( int i = 0; i < srcImage.cols;i++)
- {
- //改变map_x & map_y的值.
- map_x.at<float>(j,i) = static_cast<float>(i);
- map_y.at<float>(j,i) = static_cast<float>(srcImage.rows - j);
- }
- }
- //【4】进行重映射操作
- remap( srcImage, dstImage, map_x, map_y, CV_INTER_LINEAR, BORDER_CONSTANT, Scalar(0,0, 0) );
- //【5】显示效果图
- imshow( "【程序窗口】", dstImage );
- waitKey();
- return 0;
- }
显示效果图:
最近世界杯正如火如荼地进行着,这里的图片素材就是巴西队的球星们~
1.4 OpenCV2.X中remap函数源代码
这里我们放出remap函数的源码,供需要了解其实现细节的朋友们观看,浅墨在这里不花时间对其进行剖析。
- void cv::remap( InputArray _src, OutputArray _dst,
- InputArray _map1, InputArray _map2,
- int interpolation, int borderType, const Scalar& borderValue )
- {
- static RemapNNFunc nn_tab[] =
- {
- remapNearest<uchar>, remapNearest<schar>, remapNearest<ushort>, remapNearest<short>,
- remapNearest<int>, remapNearest<float>, remapNearest<double>, 0
- };
- static RemapFunc linear_tab[] =
- {
- remapBilinear<FixedPtCast<int, uchar, INTER_REMAP_COEF_BITS>, RemapVec_8u, short>, 0,
- remapBilinear<Cast<float, ushort>, RemapNoVec, float>,
- remapBilinear<Cast<float, short>, RemapNoVec, float>, 0,
- remapBilinear<Cast<float, float>, RemapNoVec, float>,
- remapBilinear<Cast<double, double>, RemapNoVec, float>, 0
- };
- static RemapFunc cubic_tab[] =
- {
- remapBicubic<FixedPtCast<int, uchar, INTER_REMAP_COEF_BITS>, short, INTER_REMAP_COEF_SCALE>, 0,
- remapBicubic<Cast<float, ushort>, float, 1>,
- remapBicubic<Cast<float, short>, float, 1>, 0,
- remapBicubic<Cast<float, float>, float, 1>,
- remapBicubic<Cast<double, double>, float, 1>, 0
- };
- static RemapFunc lanczos4_tab[] =
- {
- remapLanczos4<FixedPtCast<int, uchar, INTER_REMAP_COEF_BITS>, short, INTER_REMAP_COEF_SCALE>, 0,
- remapLanczos4<Cast<float, ushort>, float, 1>,
- remapLanczos4<Cast<float, short>, float, 1>, 0,
- remapLanczos4<Cast<float, float>, float, 1>,
- remapLanczos4<Cast<double, double>, float, 1>, 0
- };
- Mat src = _src.getMat(), map1 = _map1.getMat(), map2 = _map2.getMat();
- CV_Assert( map1.size().area() > 0 );
- CV_Assert( !map2.data || (map2.size() == map1.size()));
- _dst.create( map1.size(), src.type() );
- Mat dst = _dst.getMat();
- if( dst.data == src.data )
- src = src.clone();
- int depth = src.depth();
- RemapNNFunc nnfunc = 0;
- RemapFunc ifunc = 0;
- const void* ctab = 0;
- bool fixpt = depth == CV_8U;
- bool planar_input = false;
- if( interpolation == INTER_NEAREST )
- {
- nnfunc = nn_tab[depth];
- CV_Assert( nnfunc != 0 );
- }
- else
- {
- if( interpolation == INTER_AREA )
- interpolation = INTER_LINEAR;
- if( interpolation == INTER_LINEAR )
- ifunc = linear_tab[depth];
- else if( interpolation == INTER_CUBIC )
- ifunc = cubic_tab[depth];
- else if( interpolation == INTER_LANCZOS4 )
- ifunc = lanczos4_tab[depth];
- else
- CV_Error( CV_StsBadArg, "Unknown interpolation method" );
- CV_Assert( ifunc != 0 );
- ctab = initInterTab2D( interpolation, fixpt );
- }
- const Mat *m1 = &map1, *m2 = &map2;
- if( (map1.type() == CV_16SC2 && (map2.type() == CV_16UC1 || map2.type() == CV_16SC1 || !map2.data)) ||
- (map2.type() == CV_16SC2 && (map1.type() == CV_16UC1 || map1.type() == CV_16SC1 || !map1.data)) )
- {
- if( map1.type() != CV_16SC2 )
- std::swap(m1, m2);
- }
- else
- {
- CV_Assert( ((map1.type() == CV_32FC2 || map1.type() == CV_16SC2) && !map2.data) ||
- (map1.type() == CV_32FC1 && map2.type() == CV_32FC1) );
- planar_input = map1.channels() == 1;
- }
- RemapInvoker invoker(src, dst, m1, m2, interpolation,
- borderType, borderValue, planar_input, nnfunc, ifunc,
- ctab);
- parallel_for_(Range(0, dst.rows), invoker, dst.total()/(double)(1<<16));
- }
好了,重映射先就讲这么多,在文章末尾还有一个综合一点的示例程序供大家学习。下面我们开始讲解SURF相关的内容。
二.SURF特征点检测
SURF算法有一些不错的内容和用法,OpenCV中使用颇多,浅墨会花一些篇幅对其进行讲解。今天的这篇文章只是一个小小的开头,主要介绍SURF特征点检测。
先简单了解一下SURF算法的大概内容吧。
2.1 SURF算法概览
SURF,我们简单介绍一下,英语全称为SpeededUp Robust Features,直译的话就是“加速版的具有鲁棒性的特征“算法,由Bay在2006年首次提出。SURF是尺度不变特征变换算法(SIFT算法)的加速版。一般来说,标准的SURF算子比SIFT算子快好几倍,并且在多幅图片下具有更好的稳定性。SURF最大的特征在于采用了harr特征以及积分图像的概念,这大大加快了程序的运行时间。SURF可以应用于计算机视觉的物体识别以及3D重构中。
PS: 由于我们的专栏侧重点是教大家如何快速入门OpenCV编程,不是来进行图像处理科普的,所以原理部分不会花笔墨多讲。一方面是浅墨也不喜欢讲这些枯燥的概念,另一方面是大家肯定应该也不喜欢看这些枯燥的原理,大家是喜欢看代码的〜( ̄▽ ̄〜)。就像小魏CPU童鞋在博客上写的,“Talk is cheap. Show me thecode.”
所以原理部分大家就自行用搜索引擎去学习吧,浅墨会将更多的笔墨用来分享网络上独一无二的干货。
2.2 前世今生——SURF类相关OpenCV源码剖析
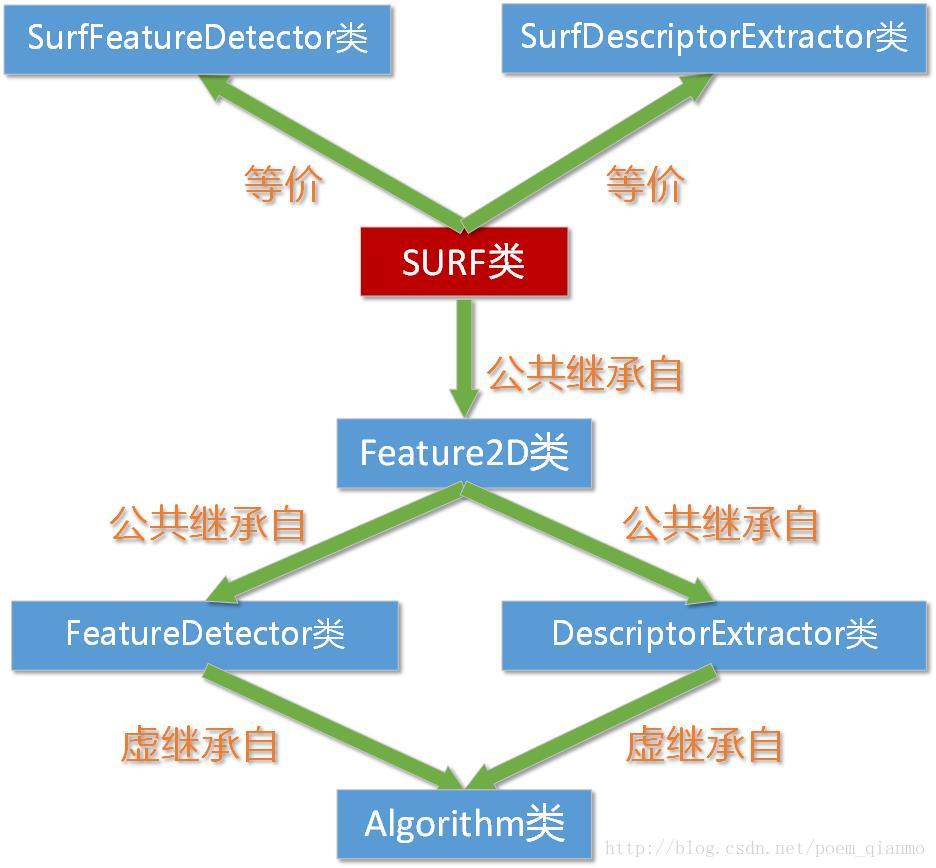
OpenCV中关于SURF算法的部分,常常涉及到的是SURF、SurfFeatureDetector、SurfDescriptorExtractor这三个类,这一小节我们就来对他们进行人肉,挖挖其背景,看看他们究竟是什么来头。
在D:\Program Files (x86)\opencv\sources\modules\nonfree\include\opencv2\nonfree下的features2d.hpp头文件中,我们可以发现这样两句定义:
- typedef SURF SurfFeatureDetector;
- typedef SURF SurfDescriptorExtractor;
我们都知道,typedef声明是为现有类型创建一个新的名字,类型别名。这就表示,SURF类忽然同时有了两个新名字SurfFeatureDetector以及SurfDescriptorExtractor。
也就是说,我们平常使用的SurfFeatureDetector类和SurfDescriptorExtractor类,其实就是SURF类,他们三者等价。
然后在这两句定义的上方,我们可以看到SURF类的类声明全貌:
- class CV_EXPORTS_W SURF : public Feature2D
- {
- public:
- //! the default constructor
- CV_WRAP SURF();
- //! the full constructor taking all the necessary parameters
- explicit CV_WRAP SURF(double hessianThreshold,
- int nOctaves=4, int nOctaveLayers=2,
- bool extended=true, bool upright=false);
- //! returns the descriptor size in float's (64 or 128)
- CV_WRAP int descriptorSize() const;
- //! returns the descriptor type
- CV_WRAP int descriptorType() const;
- //! finds the keypoints using fast hessian detector used in SURF
- void operator()(InputArray img, InputArray mask,
- CV_OUT vector<KeyPoint>& keypoints) const;
- //! finds the keypoints and computes their descriptors. Optionally it can compute descriptors for the user-provided keypoints
- void operator()(InputArray img, InputArray mask,
- CV_OUT vector<KeyPoint>& keypoints,
- OutputArray descriptors,
- bool useProvidedKeypoints=false) const;
- AlgorithmInfo* info() const;
- CV_PROP_RW double hessianThreshold;
- CV_PROP_RW int nOctaves;
- CV_PROP_RW int nOctaveLayers;
- CV_PROP_RW bool extended;
- CV_PROP_RW bool upright;
- protected:
- void detectImpl( const Mat& image, vector<KeyPoint>& keypoints, const Mat& mask=Mat() ) const;
- void computeImpl( const Mat& image, vector<KeyPoint>& keypoints, Mat& descriptors ) const;
- };
可以观察到,SURF类公共继承自Feature2D类,我们再次进行转到,可以在路径d:\Program Files(x86)\opencv\build\include\opencv2\features2d\features2d.hpp看到Feature2D类的声明:
- class CV_EXPORTS_W Feature2D : public FeatureDetector, public DescriptorExtractor
- {
- public:
- /*
- * Detect keypoints in an image.
- * image The image.
- * keypoints The detected keypoints.
- * mask Mask specifying where to look for keypoints (optional). Must be a char
- * matrix with non-zero values in the region of interest.
- * useProvidedKeypoints If true, the method will skip the detection phase and will compute
- * descriptors for the provided keypoints
- */
- CV_WRAP_AS(detectAndCompute) virtual void operator()( InputArray image, InputArray mask,
- CV_OUT vector<KeyPoint>& keypoints,
- OutputArray descriptors,
- bool useProvidedKeypoints=false ) const = 0;
- CV_WRAP void compute( const Mat& image, CV_OUT CV_IN_OUT std::vector<KeyPoint>& keypoints, CV_OUT Mat& descriptors ) const;
- // Create feature detector and descriptor extractor by name.
- CV_WRAP static Ptr<Feature2D> create( const string& name );
- };
显然,Feature2D类又是公共继承自FeatureDetector以及 DescriptorExtractor类。继续刨根问底,我们看看其父类FeatureDetector以及 DescriptorExtractor类的定义。
首先是FeatureDetector类:
- /************************************ Base Classes ************************************/
- /*
- * Abstract base class for 2D image feature detectors.
- */
- class CV_EXPORTS_W FeatureDetector : public virtual Algorithm
- {
- public:
- virtual ~FeatureDetector();
- /*
- * Detect keypoints in an image.
- * image The image.
- * keypoints The detected keypoints.
- * mask Mask specifying where to look for keypoints (optional). Must be a char
- * matrix with non-zero values in the region of interest.
- */
- CV_WRAP void detect( const Mat& image, CV_OUT vector<KeyPoint>& keypoints, const Mat& mask=Mat() ) const;
- /*
- * Detect keypoints in an image set.
- * images Image collection.
- * keypoints Collection of keypoints detected in an input images. keypoints[i] is a set of keypoints detected in an images[i].
- * masks Masks for image set. masks[i] is a mask for images[i].
- */
- void detect( const vector<Mat>& images, vector<vector<KeyPoint> >& keypoints, const vector<Mat>& masks=vector<Mat>() ) const;
- // Return true if detector object is empty
- CV_WRAP virtual bool empty() const;
- // Create feature detector by detector name.
- CV_WRAP static Ptr<FeatureDetector> create( const string& detectorType );
- protected:
- virtual void detectImpl( const Mat& image, vector<KeyPoint>& keypoints, const Mat& mask=Mat() ) const = 0;
- /*
- * Remove keypoints that are not in the mask.
- * Helper function, useful when wrapping a library call for keypoint detection that
- * does not support a mask argument.
- */
- static void removeInvalidPoints( const Mat& mask, vector<KeyPoint>& keypoints );
- };
这里,我们看到了我们以后经常会用到的detect( )方法重载的两个原型,原来是SURF类经过两层的继承,从FeatureDetector类继承而来的。
- /*
- * Detect keypoints in an image.
- * image The image.
- * keypoints The detected keypoints.
- * mask Mask specifying where to look for keypoints (optional). Must be a char
- * matrix with non-zero values in the region of interest.
- */
- CV_WRAP void detect( const Mat& image, CV_OUT vector<KeyPoint>& keypoints, const Mat& mask=Mat() ) const;
- /*
- * Detect keypoints in an image set.
- * images Image collection.
- * keypoints Collection of keypoints detected in an input images. keypoints[i] is a set of keypoints detected in an images[i].
- * masks Masks for image set. masks[i] is a mask for images[i].
- */
- void detect( const vector<Mat>& images, vector<vector<KeyPoint> >& keypoints, const vector<Mat>& masks=vector<Mat>() ) const;
同样,看看SURF类的另一个“爷爷”DescriptorExtractor类的声明。
- /*
- * Abstract base class for computing descriptors for image keypoints.
- *
- * In this interface we assume a keypoint descriptor can be represented as a
- * dense, fixed-dimensional vector of some basic type. Most descriptors used
- * in practice follow this pattern, as it makes it very easy to compute
- * distances between descriptors. Therefore we represent a collection of
- * descriptors as a Mat, where each row is one keypoint descriptor.
- */
- class CV_EXPORTS_W DescriptorExtractor : public virtual Algorithm
- {
- public:
- virtual ~DescriptorExtractor();
- /*
- * Compute the descriptors for a set of keypoints in an image.
- * image The image.
- * keypoints The input keypoints. Keypoints for which a descriptor cannot be computed are removed.
- * descriptors Copmputed descriptors. Row i is the descriptor for keypoint i.
- */
- CV_WRAP void compute( const Mat& image, CV_OUT CV_IN_OUT vector<KeyPoint>& keypoints, CV_OUT Mat& descriptors ) const;
- /*
- * Compute the descriptors for a keypoints collection detected in image collection.
- * images Image collection.
- * keypoints Input keypoints collection. keypoints[i] is keypoints detected in images[i].
- * Keypoints for which a descriptor cannot be computed are removed.
- * descriptors Descriptor collection. descriptors[i] are descriptors computed for set keypoints[i].
- */
- void compute( const vector<Mat>& images, vector<vector<KeyPoint> >& keypoints, vector<Mat>& descriptors ) const;
- CV_WRAP virtual int descriptorSize() const = 0;
- CV_WRAP virtual int descriptorType() const = 0;
- CV_WRAP virtual bool empty() const;
- CV_WRAP static Ptr<DescriptorExtractor> create( const string& descriptorExtractorType );
- protected:
- virtual void computeImpl( const Mat& image, vector<KeyPoint>& keypoints, Mat& descriptors ) const = 0;
- /*
- * Remove keypoints within borderPixels of an image edge.
- */
- static void removeBorderKeypoints( vector<KeyPoint>& keypoints,
- Size imageSize, int borderSize );
- };
上述代码表明FeatureDetector 类和DescriptorExtractor类都虚继承自Algorithm基类。
呼,历经千辛万苦,终于,我们找到SURF类德高望重的祖先——OpenCV中的Algorithm基类。看看其原型声明:
- /*!
- Base class for high-level OpenCV algorithms
- */
- class CV_EXPORTS_W Algorithm
- {
- public:
- Algorithm();
- virtual ~Algorithm();
- string name() const;
- template<typename _Tp> typename ParamType<_Tp>::member_type get(const string& name) const;
- template<typename _Tp> typename ParamType<_Tp>::member_type get(const char* name) const;
- CV_WRAP int getInt(const string& name) const;
- CV_WRAP double getDouble(const string& name) const;
- CV_WRAP bool getBool(const string& name) const;
- CV_WRAP string getString(const string& name) const;
- CV_WRAP Mat getMat(const string& name) const;
- CV_WRAP vector<Mat> getMatVector(const string& name) const;
- CV_WRAP Ptr<Algorithm> getAlgorithm(const string& name) const;
- void set(const string& name, int value);
- void set(const string& name, double value);
- void set(const string& name, bool value);
- void set(const string& name, const string& value);
- void set(const string& name, const Mat& value);
- void set(const string& name, const vector<Mat>& value);
- void set(const string& name, const Ptr<Algorithm>& value);
- template<typename _Tp> void set(const string& name, const Ptr<_Tp>& value);
- CV_WRAP void setInt(const string& name, int value);
- CV_WRAP void setDouble(const string& name, double value);
- CV_WRAP void setBool(const string& name, bool value);
- CV_WRAP void setString(const string& name, const string& value);
- CV_WRAP void setMat(const string& name, const Mat& value);
- CV_WRAP void setMatVector(const string& name, const vector<Mat>& value);
- CV_WRAP void setAlgorithm(const string& name, const Ptr<Algorithm>& value);
- template<typename _Tp> void setAlgorithm(const string& name, const Ptr<_Tp>& value);
- void set(const char* name, int value);
- void set(const char* name, double value);
- void set(const char* name, bool value);
- void set(const char* name, const string& value);
- void set(const char* name, const Mat& value);
- void set(const char* name, const vector<Mat>& value);
- void set(const char* name, const Ptr<Algorithm>& value);
- template<typename _Tp> void set(const char* name, const Ptr<_Tp>& value);
- void setInt(const char* name, int value);
- void setDouble(const char* name, double value);
- void setBool(const char* name, bool value);
- void setString(const char* name, const string& value);
- void setMat(const char* name, const Mat& value);
- void setMatVector(const char* name, const vector<Mat>& value);
- void setAlgorithm(const char* name, const Ptr<Algorithm>& value);
- template<typename _Tp> void setAlgorithm(const char* name, const Ptr<_Tp>& value);
- CV_WRAP string paramHelp(const string& name) const;
- int paramType(const char* name) const;
- CV_WRAP int paramType(const string& name) const;
- CV_WRAP void getParams(CV_OUT vector<string>& names) const;
- virtual void write(FileStorage& fs) const;
- virtual void read(const FileNode& fn);
- typedef Algorithm* (*Constructor)(void);
- typedef int (Algorithm::*Getter)() const;
- typedef void (Algorithm::*Setter)(int);
- CV_WRAP static void getList(CV_OUT vector<string>& algorithms);
- CV_WRAP static Ptr<Algorithm> _create(const string& name);
- template<typename _Tp> static Ptr<_Tp> create(const string& name);
- virtual AlgorithmInfo* info() const /* TODO: make it = 0;*/ { return 0; }
- };
关于这几个类缠绵悱恻的关系,画个图就一目了然了,也就是这样的过程:
3.3 drawKeypoints函数详解
因为接下来的示例程序需要用到drawKeypoints函数,我们在这里顺便讲一讲。
顾名思义,此函数用于绘制关键点。
- C++: void drawKeypoints(const Mat&image, const vector<KeyPoint>& keypoints, Mat& outImage, constScalar& color=Scalar::all(-1), int flags=DrawMatchesFlags::DEFAULT )


- 第一个参数,const Mat&类型的src,输入图像。
- 第二个参数,const vector<KeyPoint>&类型的keypoints,根据源图像得到的特征点,它是一个输出参数。
- 第三个参数,Mat&类型的outImage,输出图像,其内容取决于第五个参数标识符falgs。
- 第四个参数,const Scalar&类型的color,关键点的颜色,有默认值Scalar::all(-1)。
- 第五个参数,int类型的flags,绘制关键点的特征标识符,有默认值DrawMatchesFlags::DEFAULT。可以在如下这个结构体中选取值。
- struct DrawMatchesFlags
- {
- enum
- {
- DEFAULT = 0, // Output image matrix will be created (Mat::create),
- // i.e. existing memory of output image may be reused.
- // Two source images, matches, and single keypoints
- // will be drawn.
- // For each keypoint, only the center point will be
- // drawn (without a circle around the keypoint with the
- // keypoint size and orientation).
- DRAW_OVER_OUTIMG = 1, // Output image matrix will not be
- // created (using Mat::create). Matches will be drawn
- // on existing content of output image.
- NOT_DRAW_SINGLE_POINTS = 2, // Single keypoints will not be drawn.
- DRAW_RICH_KEYPOINTS = 4 // For each keypoint, the circle around
- // keypoint with keypoint size and orientation will
- // be drawn.
- };
- };
- 第一个参数,const Mat&类型的src,输入图像。
- 第二个参数,const vector<KeyPoint>&类型的keypoints,根据源图像得到的特征点,它是一个输出参数。
- 第三个参数,Mat&类型的outImage,输出图像,其内容取决于第五个参数标识符falgs。
- 第四个参数,const Scalar&类型的color,关键点的颜色,有默认值Scalar::all(-1)。
- 第五个参数,int类型的flags,绘制关键点的特征标识符,有默认值DrawMatchesFlags::DEFAULT。可以在如下这个结构体中选取值。
- struct DrawMatchesFlags
- {
- enum
- {
- DEFAULT = 0, // Output image matrix will be created (Mat::create),
- // i.e. existing memory of output image may be reused.
- // Two source images, matches, and single keypoints
- // will be drawn.
- // For each keypoint, only the center point will be
- // drawn (without a circle around the keypoint with the
- // keypoint size and orientation).
- DRAW_OVER_OUTIMG = 1, // Output image matrix will not be
- // created (using Mat::create). Matches will be drawn
- // on existing content of output image.
- NOT_DRAW_SINGLE_POINTS = 2, // Single keypoints will not be drawn.
- DRAW_RICH_KEYPOINTS = 4 // For each keypoint, the circle around
- // keypoint with keypoint size and orientation will
- // be drawn.
- };
- };
三、综合示例部分
因为这次的两个知识点关联度不大,所以不方便组织起来成为一个综合示例程序。在这里我们分开将其放出。
3.1 重映射综合示例程序
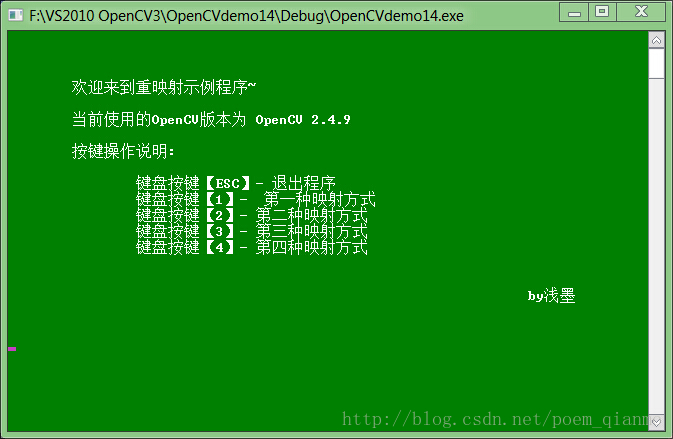
先放出以remap为核心的综合示例程序,可以用按键控制四种不同的映射模式。且利用了OpenCV版本标识宏“CV_VERSION”,在帮助文字相关代码中加入了一句:
- printf("\t当前使用的OpenCV版本为 OpenCV "CV_VERSION);
便可以智能检测出当前使用的OpenCV版本,并输出。如图:
按键说明也可以由上图看出。
放出这个程序详细注释的源代码:
- //-----------------------------------【程序说明】----------------------------------------------
- // 程序名称::《【OpenCV入门教程之十七】OpenCV重映射 & SURF特征点检测合辑 》 博文配套源码
- // 开发所用IDE版本:Visual Studio 2010
- // 开发所用OpenCV版本: 2.4.9
- // 2014年6月15日 Created by 浅墨
- // 配套博文链接: http://blog.csdn.net/poem_qianmo/article/details/30974513
- // PS:程序结合配合博文学习效果更佳
- // 浅墨的微博:@浅墨_毛星云 http://weibo.com/1723155442
- // 浅墨的知乎:http://www.zhihu.com/people/mao-xing-yun
- // 浅墨的豆瓣:http://www.douban.com/people/53426472/
- //----------------------------------------------------------------------------------------------
- //-----------------------------------【头文件包含部分】---------------------------------------
- // 描述:包含程序所依赖的头文件
- //----------------------------------------------------------------------------------------------
- #include "opencv2/highgui/highgui.hpp"
- #include "opencv2/imgproc/imgproc.hpp"
- #include <iostream>
- //-----------------------------------【命名空间声明部分】--------------------------------------
- // 描述:包含程序所使用的命名空间
- //-----------------------------------------------------------------------------------------------
- using namespace cv;
- using namespace std;
- //-----------------------------------【宏定义部分】--------------------------------------------
- // 描述:定义一些辅助宏
- //------------------------------------------------------------------------------------------------
- #define WINDOW_NAME "【程序窗口】" //为窗口标题定义的宏
- //-----------------------------------【全局变量声明部分】--------------------------------------
- // 描述:全局变量的声明
- //-----------------------------------------------------------------------------------------------
- Mat g_srcImage, g_dstImage;
- Mat g_map_x, g_map_y;
- //-----------------------------------【全局函数声明部分】--------------------------------------
- // 描述:全局函数的声明
- //-----------------------------------------------------------------------------------------------
- int update_map( int key);
- static void ShowHelpText( );//输出帮助文字
- //-----------------------------------【main( )函数】--------------------------------------------
- // 描述:控制台应用程序的入口函数,我们的程序从这里开始执行
- //-----------------------------------------------------------------------------------------------
- int main( int argc, char** argv )
- {
- //改变console字体颜色
- system("color 2F");
- //显示帮助文字
- ShowHelpText();
- //【1】载入原始图
- g_srcImage = imread( "1.jpg", 1 );
- if(!g_srcImage.data ) { printf("读取图片错误,请确定目录下是否有imread函数指定的图片存在~! \n"); return false; }
- imshow("原始图",g_srcImage);
- //【2】创建和原始图一样的效果图,x重映射图,y重映射图
- g_dstImage.create( g_srcImage.size(), g_srcImage.type() );
- g_map_x.create( g_srcImage.size(), CV_32FC1 );
- g_map_y.create( g_srcImage.size(), CV_32FC1 );
- //【3】创建窗口并显示
- namedWindow( WINDOW_NAME, CV_WINDOW_AUTOSIZE );
- imshow(WINDOW_NAME,g_srcImage);
- //【4】轮询按键,更新map_x和map_y的值,进行重映射操作并显示效果图
- while( 1 )
- {
- //获取键盘按键
- int key = waitKey(0);
- //判断ESC是否按下,若按下便退出
- if( (key & 255) == 27 )
- {
- cout << "程序退出...........\n";
- break;
- }
- //根据按下的键盘按键来更新 map_x & map_y的值. 然后调用remap( )进行重映射
- update_map(key);
- remap( g_srcImage, g_dstImage, g_map_x, g_map_y, CV_INTER_LINEAR, BORDER_CONSTANT, Scalar(0,0, 0) );
- //显示效果图
- imshow( WINDOW_NAME, g_dstImage );
- }
- return 0;
- }
- //-----------------------------------【update_map( )函数】--------------------------------
- // 描述:根据按键来更新map_x与map_x的值
- //----------------------------------------------------------------------------------------------
- int update_map( int key )
- {
- //双层循环,遍历每一个像素点
- for( int j = 0; j < g_srcImage.rows;j++)
- {
- for( int i = 0; i < g_srcImage.cols;i++)
- {
- switch(key)
- {
- case '1': // 键盘【1】键按下,进行第一种重映射操作
- if( i > g_srcImage.cols*0.25 && i < g_srcImage.cols*0.75 && j > g_srcImage.rows*0.25 && j < g_srcImage.rows*0.75)
- {
- g_map_x.at<float>(j,i) = static_cast<float>(2*( i - g_srcImage.cols*0.25 ) + 0.5);
- g_map_y.at<float>(j,i) = static_cast<float>(2*( j - g_srcImage.rows*0.25 ) + 0.5);
- }
- else
- {
- g_map_x.at<float>(j,i) = 0;
- g_map_y.at<float>(j,i) = 0;
- }
- break;
- case '2':// 键盘【2】键按下,进行第二种重映射操作
- g_map_x.at<float>(j,i) = static_cast<float>(i);
- g_map_y.at<float>(j,i) = static_cast<float>(g_srcImage.rows - j);
- break;
- case '3':// 键盘【3】键按下,进行第三种重映射操作
- g_map_x.at<float>(j,i) = static_cast<float>(g_srcImage.cols - i);
- g_map_y.at<float>(j,i) = static_cast<float>(j);
- break;
- case '4':// 键盘【4】键按下,进行第四种重映射操作
- g_map_x.at<float>(j,i) = static_cast<float>(g_srcImage.cols - i);
- g_map_y.at<float>(j,i) = static_cast<float>(g_srcImage.rows - j);
- break;
- }
- }
- }
- return 1;
- }
- //-----------------------------------【ShowHelpText( )函数】----------------------------------
- // 描述:输出一些帮助信息
- //----------------------------------------------------------------------------------------------
- static void ShowHelpText()
- {
- //输出一些帮助信息
- printf("\n\n\n\t欢迎来到重映射示例程序~\n\n");
- printf("\t当前使用的OpenCV版本为 OpenCV "CV_VERSION);
- printf( "\n\n\t按键操作说明: \n\n"
- "\t\t键盘按键【ESC】- 退出程序\n"
- "\t\t键盘按键【1】- 第一种映射方式\n"
- "\t\t键盘按键【2】- 第二种映射方式\n"
- "\t\t键盘按键【3】- 第三种映射方式\n"
- "\t\t键盘按键【4】- 第四种映射方式\n"
- "\n\n\t\t\t\t\t\t\t\t by浅墨\n\n\n"
- );
- }
运行效果图。首先是原始图:
第一种重映射:
第二种重映射:
第三种重映射:
第四种重映射:
3.2 SURF特征点检测综合示例程序
这个示例程涉及到如下三个方面:




- 使用 FeatureDetector 接口来发现感兴趣点。
- 使用 SurfFeatureDetector 以及其函数 detect 来实现检测过程
- 使用函数 drawKeypoints 绘制检测到的关键点。
- 使用 FeatureDetector 接口来发现感兴趣点。
- 使用 SurfFeatureDetector 以及其函数 detect 来实现检测过程
- 使用函数 drawKeypoints 绘制检测到的关键点。
详细注释的源代码:
- //-----------------------------------【程序说明】----------------------------------------------
- // 程序名称::《【OpenCV入门教程之十七】OpenCV重映射 & SURF特征点检测合辑 》 博文配套源码 之【SURF特征点检测】
- // 开发所用IDE版本:Visual Studio 2010
- // 开发所用OpenCV版本: 2.4.9
- // 2014年6月15日 Created by 浅墨
- // 配套博文链接: http://blog.csdn.net/poem_qianmo/article/details/30974513
- // PS:程序结合配合博文学习效果更佳
- // 浅墨的微博:@浅墨_毛星云 http://weibo.com/1723155442
- // 浅墨的知乎:http://www.zhihu.com/people/mao-xing-yun
- // 浅墨的豆瓣:http://www.douban.com/people/53426472/
- //----------------------------------------------------------------------------------------------
- //-----------------------------------【头文件包含部分】---------------------------------------
- // 描述:包含程序所依赖的头文件
- //----------------------------------------------------------------------------------------------
- #include "opencv2/core/core.hpp"
- #include "opencv2/features2d/features2d.hpp"
- #include "opencv2/highgui/highgui.hpp"
- #include "opencv2/nonfree/nonfree.hpp"
- #include <iostream>
- //-----------------------------------【命名空间声明部分】--------------------------------------
- // 描述:包含程序所使用的命名空间
- //-----------------------------------------------------------------------------------------------
- using namespace cv;
- //-----------------------------------【全局函数声明部分】--------------------------------------
- // 描述:全局函数的声明
- //-----------------------------------------------------------------------------------------------
- static void ShowHelpText( );//输出帮助文字
- //-----------------------------------【main( )函数】--------------------------------------------
- // 描述:控制台应用程序的入口函数,我们的程序从这里开始执行
- //-----------------------------------------------------------------------------------------------
- int main( int argc, char** argv )
- {
- //【0】改变console字体颜色
- system("color 2F");
- //【0】显示帮助文字
- ShowHelpText( );
- //【1】载入源图片并显示
- Mat srcImage1 = imread("1.jpg", 1 );
- Mat srcImage2 = imread("2.jpg", 1 );
- if( !srcImage1.data || !srcImage2.data )//检测是否读取成功
- { printf("读取图片错误,请确定目录下是否有imread函数指定名称的图片存在~! \n"); return false; }
- imshow("原始图1",srcImage1);
- imshow("原始图2",srcImage2);
- //【2】定义需要用到的变量和类
- int minHessian = 400;//定义SURF中的hessian阈值特征点检测算子
- SurfFeatureDetector detector( minHessian );//定义一个SurfFeatureDetector(SURF) 特征检测类对象
- std::vector<KeyPoint> keypoints_1, keypoints_2;//vector模板类是能够存放任意类型的动态数组,能够增加和压缩数据
- //【3】调用detect函数检测出SURF特征关键点,保存在vector容器中
- detector.detect( srcImage1, keypoints_1 );
- detector.detect( srcImage2, keypoints_2 );
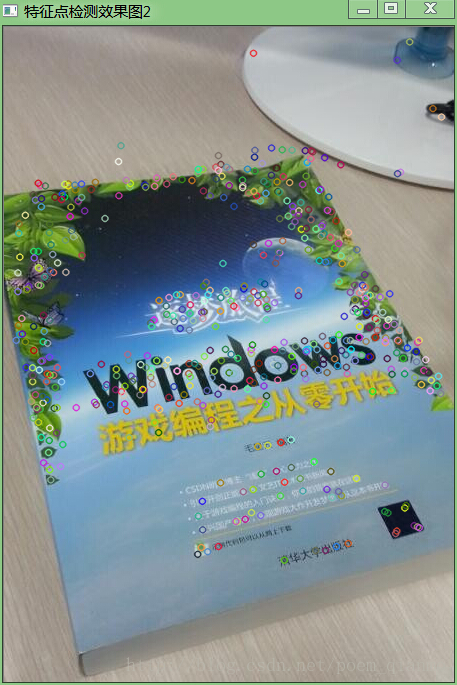
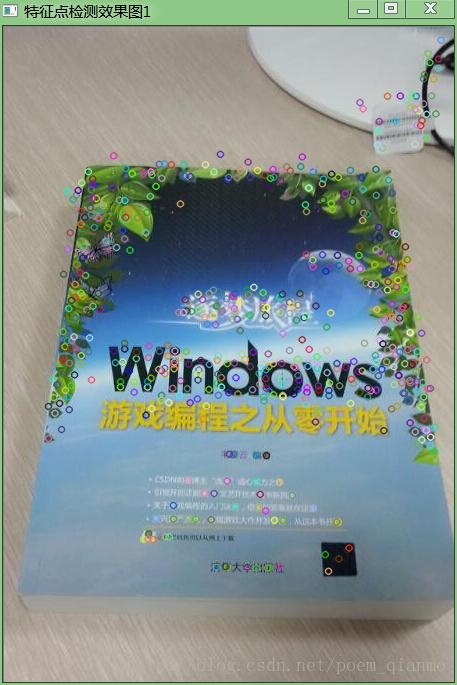
- //【4】绘制特征关键点
- Mat img_keypoints_1; Mat img_keypoints_2;
- drawKeypoints( srcImage1, keypoints_1, img_keypoints_1, Scalar::all(-1), DrawMatchesFlags::DEFAULT );
- drawKeypoints( srcImage2, keypoints_2, img_keypoints_2, Scalar::all(-1), DrawMatchesFlags::DEFAULT );
- //【5】显示效果图
- imshow("特征点检测效果图1", img_keypoints_1 );
- imshow("特征点检测效果图2", img_keypoints_2 );
- waitKey(0);
- return 0;
- }
- //-----------------------------------【ShowHelpText( )函数】----------------------------------
- // 描述:输出一些帮助信息
- //----------------------------------------------------------------------------------------------
- void ShowHelpText()
- {
- //输出一些帮助信息
- printf("\n\n\n\t欢迎来到【SURF特征点检测】示例程序~\n\n");
- printf("\t当前使用的OpenCV版本为 OpenCV "CV_VERSION);
- printf( "\n\n\t按键操作说明: \n\n"
- "\t\t键盘按键任意键- 退出程序\n\n"
- "\n\n\t\t\t\t\t\t\t\t by浅墨\n\n\n");
- }
这里的图片素材是浅墨自己用手机拍的自己写的书:)
第一组图片对比效果:
第二组图片对比效果:
本篇文章的配套源代码请点击这里下载:
【浅墨OpenCV入门教程之十七】配套源代码之【重映射】 下载
------------------------------------------------------------------------
OK,今天的内容大概就是这些,我们下篇文章见:)

















 1112
1112

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









