







 本文介绍了如何利用RANSAC算法求解二维图像的仿射变换矩阵。RANSAC通过随机选取子集来估计模型,确保适应于大部分数据点。详细讲述了算法步骤,并提供了函数调用示例及参数解释,还提到了可能出现的编译问题及其解决方案。
本文介绍了如何利用RANSAC算法求解二维图像的仿射变换矩阵。RANSAC通过随机选取子集来估计模型,确保适应于大部分数据点。详细讲述了算法步骤,并提供了函数调用示例及参数解释,还提到了可能出现的编译问题及其解决方案。
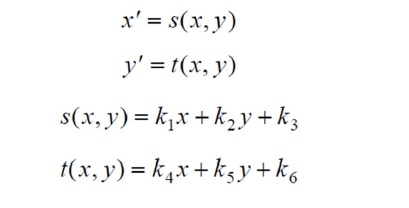
二维图像仿射变换的6参数模型
RANSAC通过反复选择数据中的一组随机子集来达成目标。被选取的子集被假设为局内点,并用下述方法
进行验证:
- 有一个模型适应于假设的局内点,即所有的未知参数都能从假设的局内点计算得出。(求解仿射变换,至少需要三个点)
- 用1中得到的模型去测试所有的其它数据,如果某个点适用于估计的模型,认为它也是局内点。
- 如果有足够多的点被归类为假设的局内点,那么估计的模型就足够合理。
- 然后,用所有假设的局内点去重新估计模型,因为它仅仅被初始的假设局内点估计过。
最后,通过估计局内点与模型的错误率来评估模型。
这个过程被重复执行固定的次数,每次产生的模型要么因为局内点太少而被舍弃,要么因为比现有的模型更好而被选用。
函数调用
int estimateAffine2D(cv::InputArray _from, cv::InputArray _to,
cv::OutputArray _out, cv::OutputArray _inliers,
double param1=3, double param2=0.99);参数介绍:
_from和_to是输入参数,vector< point >类型,输入匹配点的坐标。
_out是Mat类型,返回计算出来的模型参数,即上面的6个未知数,是一个2X3的矩阵。
_inliers是Mat类型,返回输入点是否为内点的判断。
param1指依据现有模型能够把一个点判断为内点的最大误差。
param2指模型的置信度,设置在0.95-0.99间。
下面是源代码,可能会遇到提示未定义numeric_limits::epsilon();的问题,这条语句的意思是获取编译器能够计算的最小浮点数,需要添加库#include < limits >
//Affine2D.hpp
class Affine2DEstimator
{
public:
Affine2DEstimator();
int runKernel( const CvMat* m1, const CvMat* m2, CvMat* model );
bool runRANSAC( const CvMat* m1, const CvMat* m2, CvMat* model,
CvMat* mask, double threshold,
double confidence=0.99, int maxIters=2000 );
bool getSubset( const CvMat* m1, const CvMat* m2,
CvMat* ms1, CvMat* ms2, int maxAttempts=1000 );
bool checkSubset( const CvMat* ms1, int count );
int findInliers( const CvMat* m1, const CvMat* m2,
const CvMat* model, CvMat* error,
CvMat* mask, double threshold );
void computeReprojError( const CvMat* m1, const CvMat* m2, const CvMat* model, CvMat* error );
protected:
CvRNG rng;
int modelPoints;
CvSize modelSize;
int maxBasicSolutions;
bool checkPartialSubsets;
};
int estimateAffine2D(cv::InputArray _from, cv::InputArray _to,
cv::OutputArray _out, cv::OutputArray _inliers,
double param1=3, double param2=0.99);//affine2D.cpp
int Affine2DEstimator::findInliers(  最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1100
1100

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









