







 本文深入探讨了凸集的概念,包括affine set、convex set、convex combination及convex hull等,并通过实例解释了如何从affine set转换为convex set,以及convex hull的作用。此外,还介绍了conic combination、conic cone和conic hull的概念,并讨论了欧拉球、椭球、线性代数中的超平面和半空间。最后,阐述了保持凸性的运算和一些重要的例子。
本文深入探讨了凸集的概念,包括affine set、convex set、convex combination及convex hull等,并通过实例解释了如何从affine set转换为convex set,以及convex hull的作用。此外,还介绍了conic combination、conic cone和conic hull的概念,并讨论了欧拉球、椭球、线性代数中的超平面和半空间。最后,阐述了保持凸性的运算和一些重要的例子。
Convex opt 第二讲(convex set)
Affine set
affine set 表示经过两点的一条线,这条线满足:
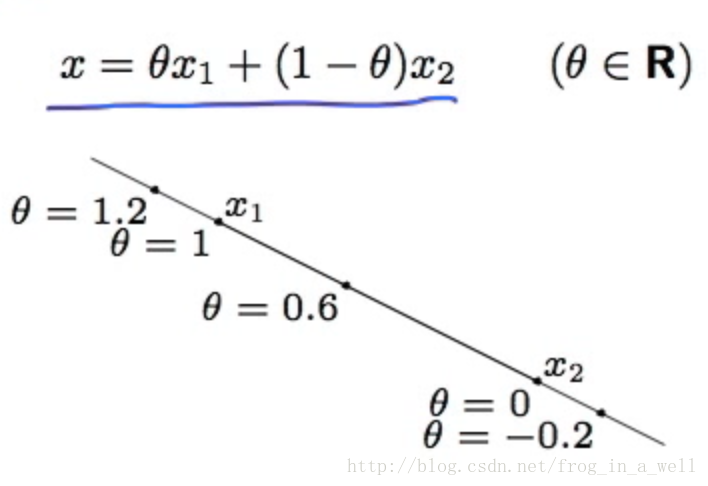
相较于后面我们要讨论的convex set,这里少了一些限制,是一个更广意义的直线,当theta取任意实数时,这条直线在无限的空间中延伸扩展。
当我们取theta大于1时,此时x1占的权重较大,x2较小,点就在靠近x1的方向上,当theta小于0时,此时x2占的权重较大,点就在靠近x2的方向上。
Affine set标准定义:
包含了所有经过affine set中任意两点的直线的set。
例子:什么是affineset:
方程组的解空间。
如果我们有两个点可以解决上面的方程,那么他们的解的组合也是方程的解:推倒过程如下:
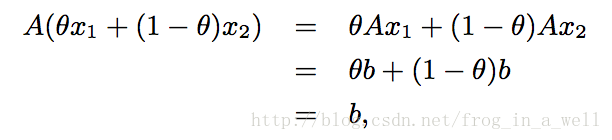
根据定义,我想在线性代数中的column space,row space,null space,left null space也是affine set,因为他们满足任意两个向量的线性组合也在这个space中。
Convex set
Convex set就是在affine set的基础之上多了一些条件,那条直线,变成了线段,我们通过限定theta的取值范围来限定set的取值为两点之间的线段。数学描述如下:
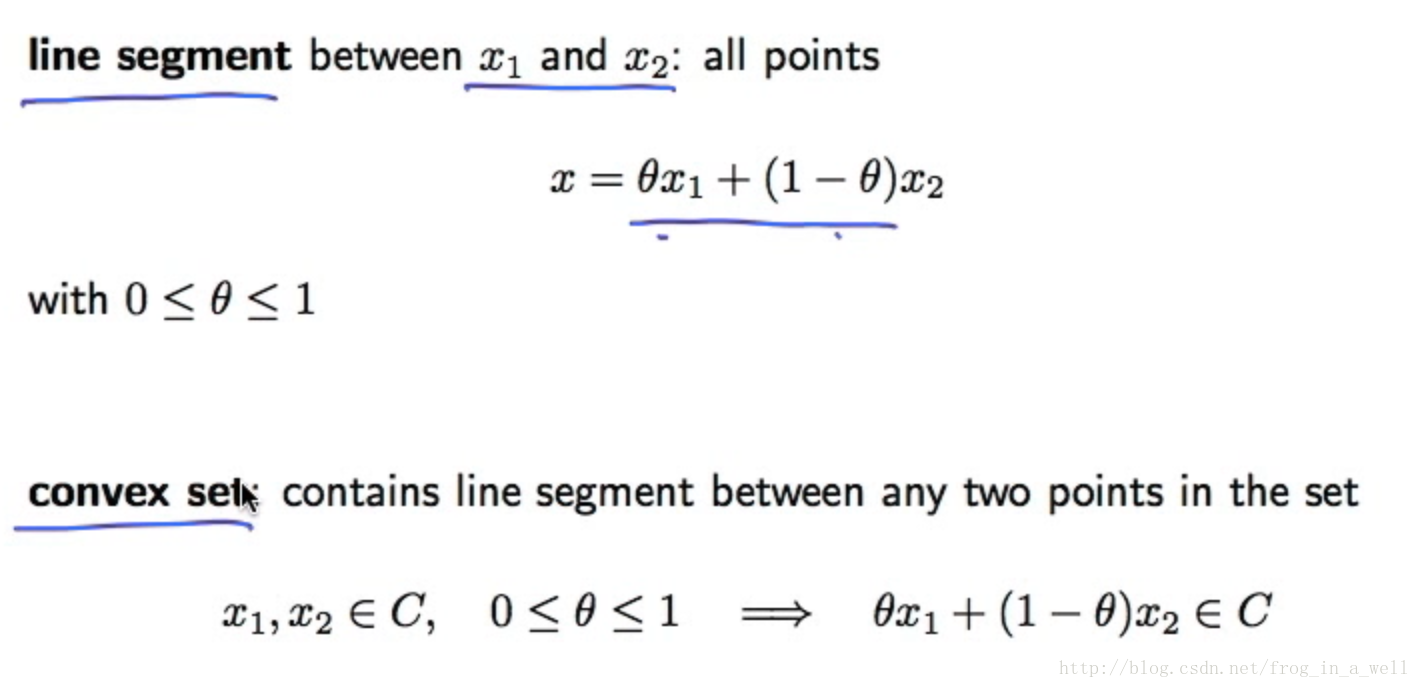
通过限定theta取值范围为0到1,我们能够得到:
反之亦然。
下面是一些关于convex set的例子:
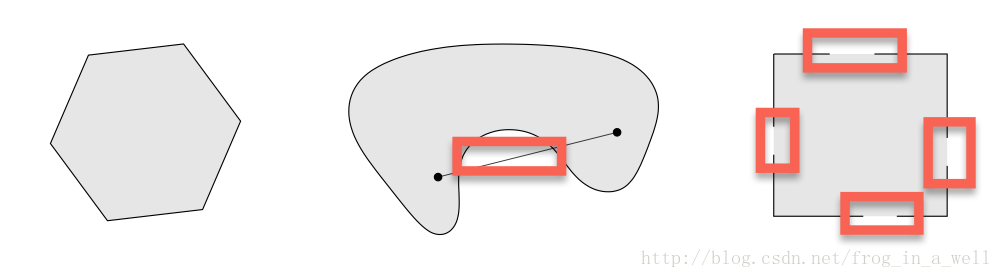
第一个图是一个正六边形,它是convex的,因为它内部的任意两点的连线也被包含在该图形的内部。
第二个图不是convex的,因为当我们连接set中的两点时,出现了未被包含在set中的点,即上图中红色方框中的区域。
第三个图不是convex的,原因同二。
Convex combination
Convex combination是符合以下要求的形式:
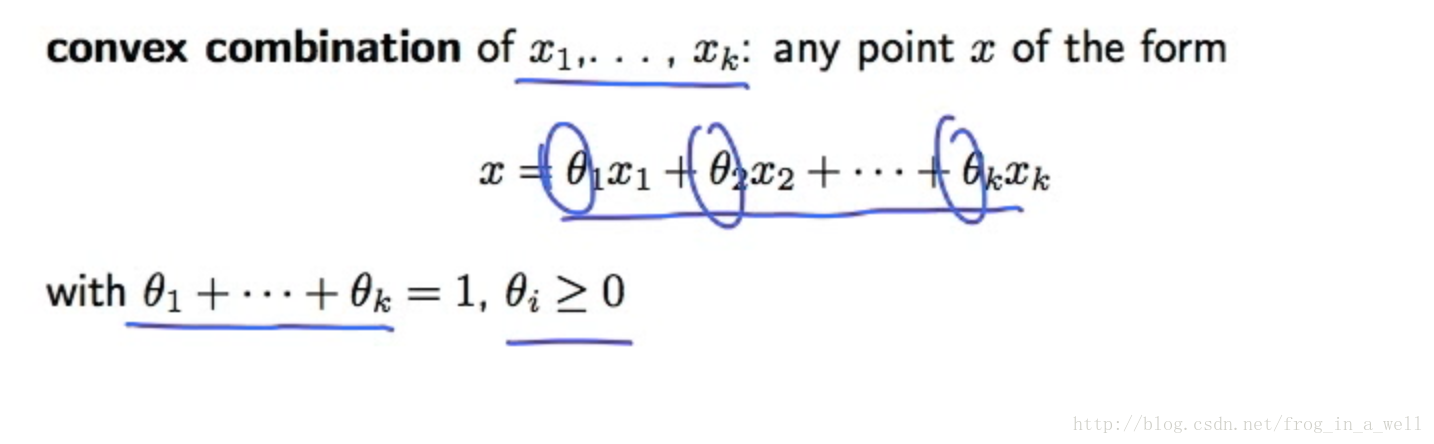
表示的是k个点以不同的权重相加生成一个新的点,权重是非负的,且theta相加之和为1。
Convex hull
Convex hull 包含了set中所有点的convex combination组合出的所有的新点。其数学表示如下:
我们再来看看几何直观上的感受:
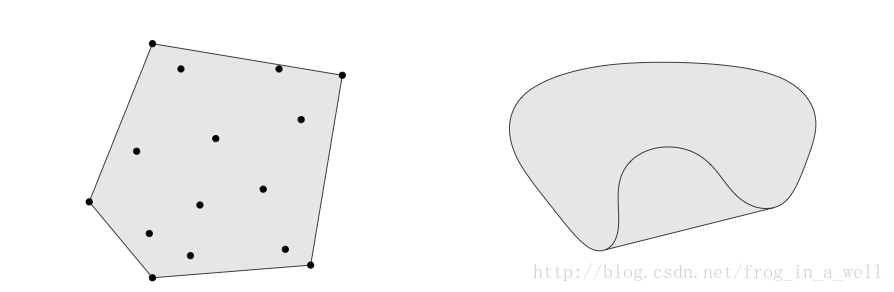
第一个图表示的是set中的点集通过convex combination过程形成的一个灰色区域,而这个区域就是convexhull。
第二个图是原来的肾形区域(non-convex)通过convex combination过程形成的另外一个灰色区域(convex)。
这个由基础点集生成一个convex空间的概念类似于线性代数中的column vector通过线性的运算来span column space。
那么convex hull的作用是什么呢?就是将non-convexset变成最小的包含原来non-convexset的convex set。
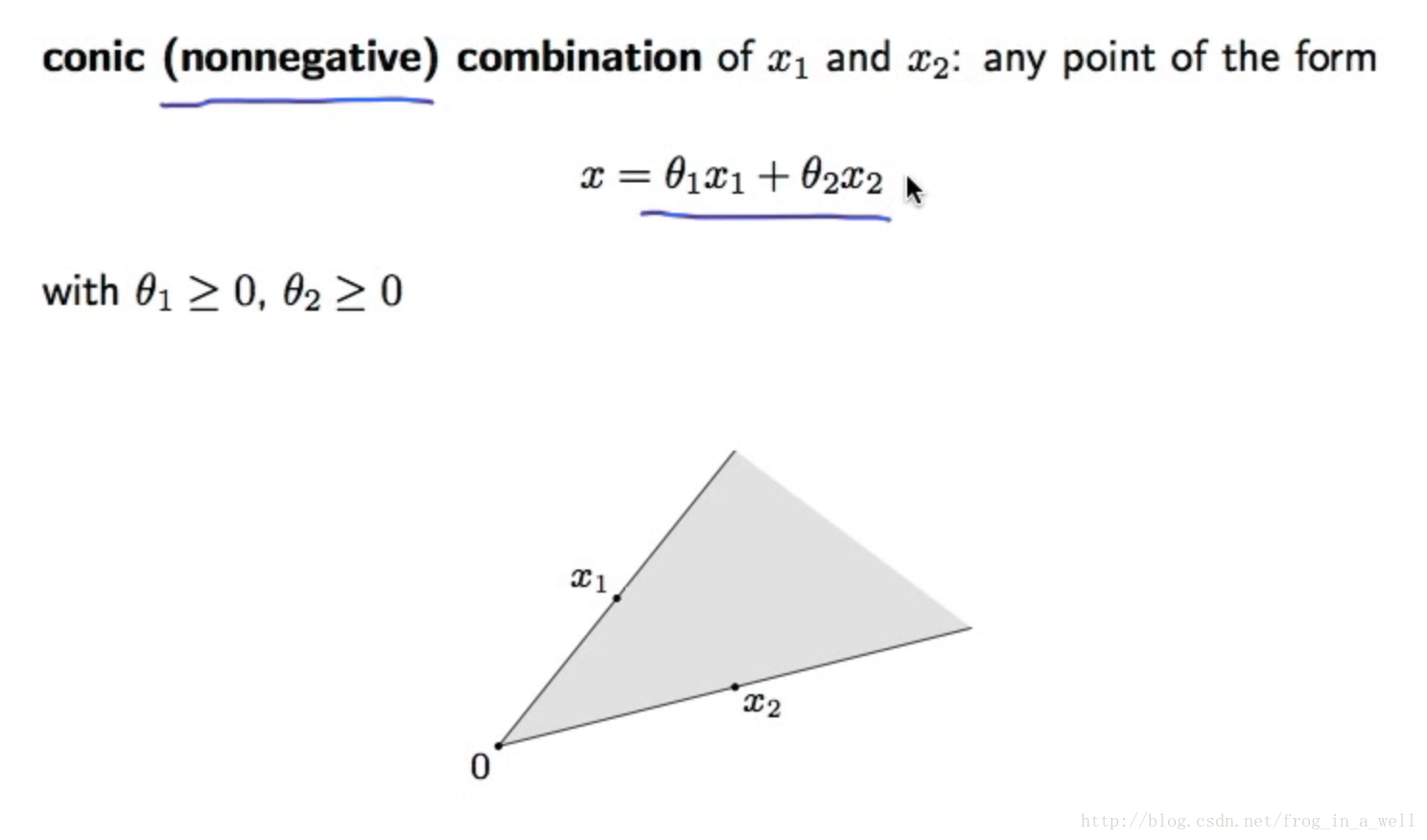
Conic combination
conic combination指的是由set中的任意两点通过线性组合产生一个新点,线性组合是非负的。
几何意义是一个通过vectorx1,x2产生锥形区域。在线性代数中即为两个vector的线性组合生成的空间中非负组合的那一块。
Conic cone
Conic cone是包含原来set中所有点经过conic combination组合产生的点的set。
这个set对应至前面我们的affineset-convex set- convex hull概念链条中的affine set,是一个比较general的概念。
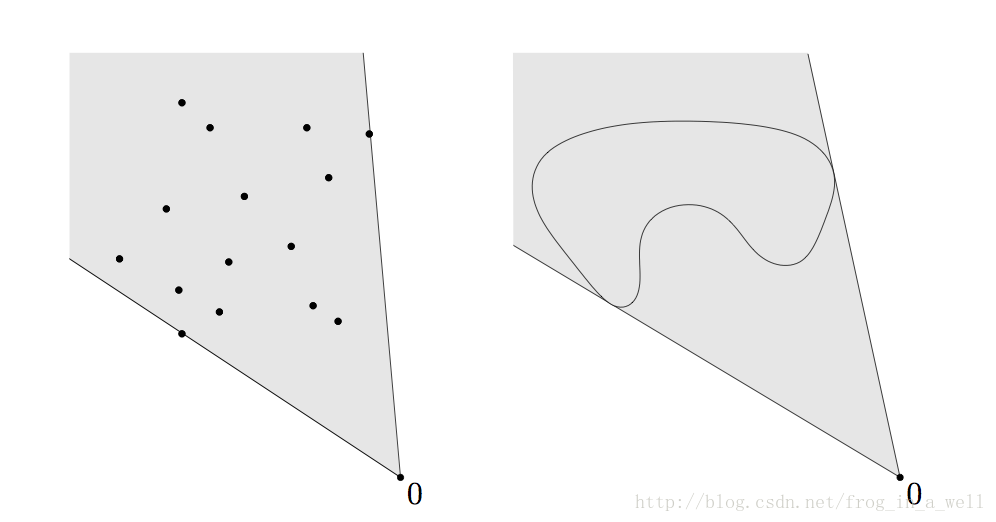
Conic hull
conic hull是包含了原来set中所有点的最小的conic cone。

例子:以下是两个conichull的例子:coniccone可以想象为在以下的hull基础上增加了一些元素。
一些重要的例子
通过之前的定义,我们不难得出以下结论:
1. 空集和包含一个点的点集是affine且convex的。
2. 一条直线是affine的,如果这条线过原点,那么它还是convex cone。
3. 一条线段是convex的,但不是affine的(除非其为一个点)。
4. 一条射线是convex的,但不是affine的。
5. 任何的subspace是affine的,也是convex cone。

















 486
486

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









