






从技术角度观察行业发展,努力跟上时代的步伐。公众号致力于点云处理,SLAM,三维视觉,具身智能,自动驾驶等领域相关内容的干货分享,欢迎各位加入,有兴趣的可联系dianyunpcl@163.com。文章未申请原创,未经过本人允许请勿转载,有意转载联系微信920177957。
摘要
在机器人技术快速迭代的今天,开发者对通信中间件的需求已从基础的通信功能转向高效、灵活与智能化。智元机器人推出的开源中间件AimRT,凭借其现代化的架构设计、轻量化部署能力及强大的生态兼容性,正成为机器人开发领域的革新力量。本文将从技术特性、生态兼容性、应用场景及未来展望等角度,深入解析AimRT的核心价值。
AimRT的核心技术亮点
1. 现代C++与轻量化设计
AimRT基于C++20标准开发,充分利用了现代C++的高效性与灵活性,通过资源管控和异步编程优化了性能与资源利用率。其轻量化设计使得AimRT可在资源受限的机器人端侧设备、边缘计算节点及云端灵活部署,尤其适合需要实时响应的场景(如自主导航、多传感器融合)。
2. 工具链与可观测性支持
AimRT提供了一套完整的调试与性能分析工具链,包括实时监控、故障诊断及性能可视化工具,帮助开发者快速定位瓶颈问题。例如,通过可观测性支持,开发者能够实时跟踪节点间的通信延迟与资源占用率,显著提升系统稳定性。
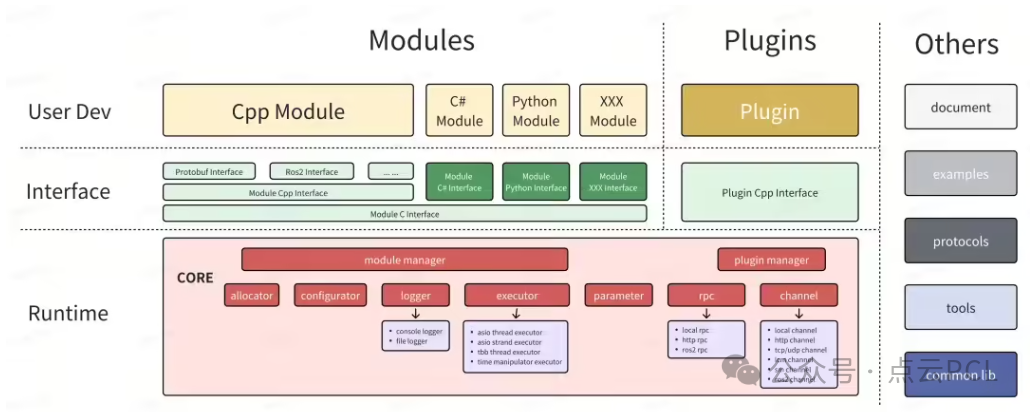
3. 插件化架构与扩展性
AimRT的插件开发接口允许开发者灵活扩展功能,目前已支持十余种官方插件(如ROS2适配器、HTTP/GRPC通信模块等)。这种设计不仅降低了二次开发门槛,还支持用户根据需求定制私有协议或集成第三方算法(如AI模型),实现从传统机器人到AI驱动的智能系统的平滑过渡。
生态兼容性与渐进式升级
1. 无缝对接主流机器人生态
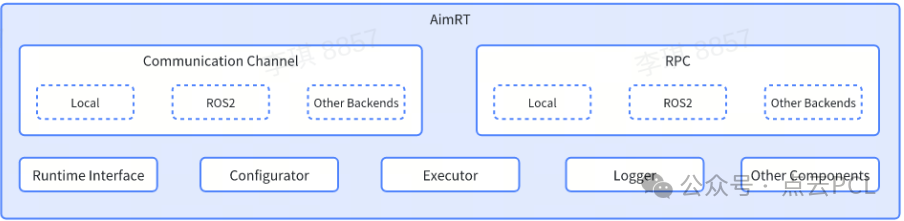
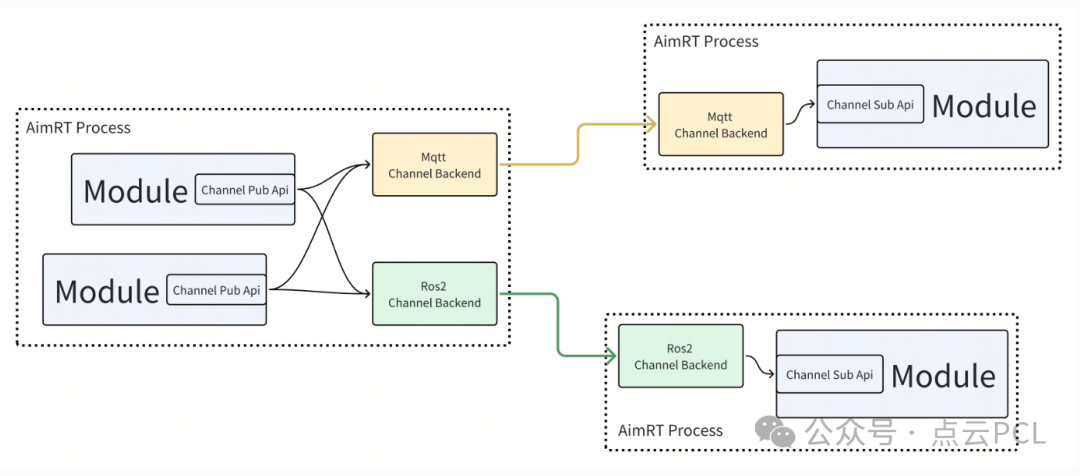
AimRT在设计之初即注重与传统机器人生态的兼容性,支持ROS2(Humble版本)、HTTP、GRPC、MQTT等多种协议。通过官方提供的ROS2插件,AimRT节点可直接融入现有ROS2网络,复用ROS社区的算法库(如SLAM、运动控制),同时享受AimRT在资源管理和异步通信上的优势。
2. 跨场景部署能力
无论是端侧设备的实时控制、边缘端的协同计算,还是云端的分布式任务调度,AimRT均能通过统一的接口实现高效通信。例如,某服务机器人公司通过AimRT整合多传感器数据,实现了云端路径规划与端侧执行的协同,开发周期缩短30%。
3. 渐进式升级路径
对于已有ROS或其他框架的系统,AimRT支持逐步替换关键模块,避免“推倒重来”的风险。这种策略尤其适合需要兼顾稳定性和技术迭代的企业用户。
应用场景与案例
1. 工业与物流领域
在智能制造场景中,AimRT的高效通信能力可支持多机器人协作任务,如AGV调度、机械臂协同操作等。其轻量化特性也适用于低功耗的仓储机器人。
2. AI与云机器人
结合智元机器人自研的具身智能大模型(如GO-1),AimRT可作为AI算法与硬件本体的桥梁。例如,通过AimRT传输视觉数据至云端大模型,再返回决策指令至机器人端,实现复杂任务的实时处理。
3. 服务与家庭机器人
某案例中,服务机器人通过AimRT集成多模态传感器(如摄像头、麦克风),利用插件扩展语音交互功能,显著提升了用户体验。

未来展望:开源生态与行业影响
1. 开源策略的长期价值
AimRT的开源(GitHub/Gitee)将吸引全球开发者共建生态,推动中间件功能的快速迭代。智元已明确表示将持续投入社区建设,并计划推出更多官方插件(如强化学习仿真模块)。
2. 与AI技术的深度融合
随着智元在具身智能领域的突破(如ViLLA框架),AimRT有望进一步优化与AI模型的集成效率,例如通过低延迟通信支持实时决策,或通过标准化接口适配多模态数据流。
3. 行业标准化推动
AimRT的轻量化与兼容性设计,可能加速机器人通信协议的标准化进程,降低跨平台开发成本,推动人形机器人等新兴领域的普及。
总结
AimRT的发布不仅是智元机器人在技术布局上的关键一步,更是对机器人开发模式的一次革新。其现代架构、灵活生态与开源策略,为开发者提供了从传统机器人到智能系统的平滑过渡路径。随着AI与机器人技术的深度融合,AimRT有望成为连接硬件、算法与场景的核心纽带,推动行业迈向更开放、更高效的新时代。
接下来博主将分享更多ROS2和AimRT相关开发内容,敬请期待...
相关阅读:2024年度历史文章大汇总
以上内容如有错误请留言评论,欢迎指正交流。如有侵权,请联系删除

扫描二维码
关注我们
让我们一起分享一起学习吧!期待有想法,乐于分享的小伙伴加入知识星球注入爱分享的新鲜活力。分享的主题包含但不限于三维视觉,点云,具身智能,自动驾驶,以及机器人等相关的领域。
分享与合作:微信“920177957”(备注:姓名+学校/公司+研究方向) 联系邮箱:dianyunpcl@163.com。
为分享的伙伴们点赞吧!




















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











