









C++ 多线程
C++ 开发过程中多线程是基本的技能,很多Coder虽然在使用多线程但可能用C++11里的std::thread机会还真不多,比如
- windows开发微软的Createthread;
- Qt工程师常用的Qthread;
- linux平台开发常用的pthread;
相比较这些而言std::thread的优势,真的不明显····Createthread和Qthread太有局限性,分别依赖windows平台和Qt库,而pthread简单粗暴,还不支持windows,无法跨平台开发,总之用好std::thread对自己来说是个巨大的提升。
std::thread入门代码
#include<iostream>
#include <thread>
using namespace std;
class ClassFunc {
public:
void hello() {
std::cout << "ClassFunc Hello World! "
<<"thread id="<< std::this_thread::get_id() << std::endl;
}
};
void NoParamDone()
{
cout << "thread id=" << std::this_thread::get_id() << endl;
cout << "World!" << endl;
}
void HaveParamDone(int a,int b)
{
cout << "thread id=" << std::this_thread::get_id() << endl;
cout << "World!"<< " " << a << " " << b << endl;
}
int main()
{
cout << "main thread id=" << std::this_thread::get_id() << endl;
thread thread_lambda([] {
cout << "thread id="<<std::this_thread::get_id()<<endl;
cout << "Hello" <<endl;
});
thread thread_nor1(NoParamDone);
thread thread_nor2(HaveParamDone, 66, 77);
{
ClassFunc class_func;
std::thread t_class(&ClassFunc::hello, &class_func);
t_class.join();
}
thread_lambda.join();
thread_nor1.join();
thread_nor2.join();
system("pause");
}
/*
输出:
main thread id=15248
thread id=12616
Hello
thread id=1240
World! thread id=13412
World!
66 ClassFunc Hello World! thread id=12956
77
*/
用起来难么?—很简单
std::thread,支持有参、无参、lambda表达式、类的普通成员函数;个人认为写起来方便优雅
join和detach 两种启动线程的方式
- join 在一个线程环境下开启一个子线程并调用了join(),当前线程将会一直阻塞直到被启动的那个子线程返回为止;
- detach 在一个线程环境下开启一个子线程并调用了detach(),当前线程不会等待子线程结束才结束;子线程转为后台线程,子线程将由系统(运行时库)托管,子线程的“死活”就和主线程无关。子线程结束后,由系统自动释放其资源。也称为守护线程;
#include<iostream>
#include <thread>
using namespace std;
void TestFunc()
{
std::chrono::milliseconds dura(25);
for (int i = 0; i < 5; i++) {
cout << "thread id=" << std::this_thread::get_id() << "index=" << i << endl;
std::this_thread::sleep_for(dura);
}
}
int main()
{
cout << "main thread id=" << std::this_thread::get_id() << endl;
thread thread_nor1(TestFunc);
thread_nor1.join();
//thread_nor1.detach();
std::chrono::milliseconds dura(25);
for (int i = 0; i < 5; i++) {
cout << "main thread id=" << std::this_thread::get_id() << "index=" << i << endl;
}
system("pause");
}
Join的运行结果

detach的运行结果

不调用join或detach 会发生什么?
先说结论:线程依然被启动执行,join或detach只改变父子线程的结束顺序关系和子线程的状态
C++ 11 线程状态
C++11中,线程创建后,有两种状态:
- joinable
- nonjoinable
对应以下两种情况:
- 默认构造函数构造后状态为nonjoinable;
- 线程对象通过有参构造函数创建后状态为joinable。调用join()/detach()会变成nonjoinable状态;
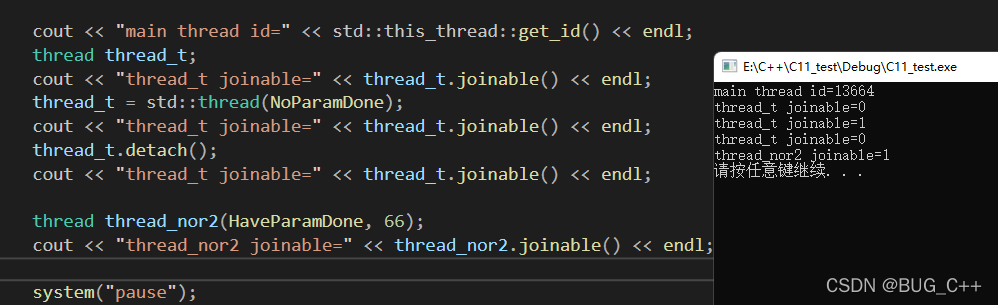
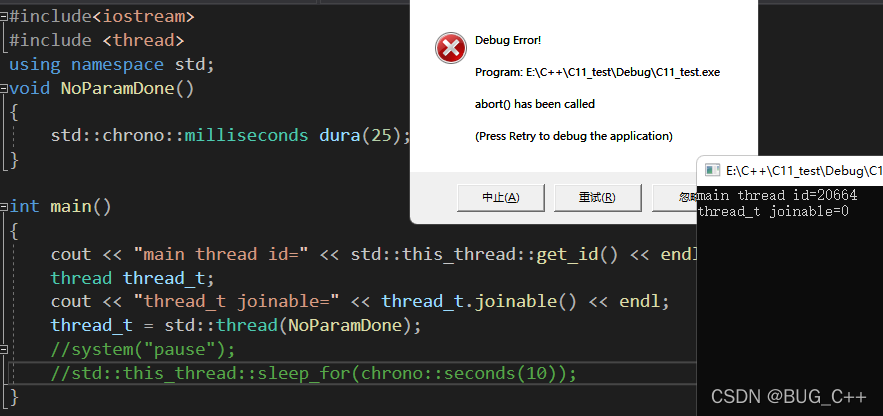
当thread对象析构时,会判断joinable状态,如果当前对象是joinable的,就会调用std::terminate(),结束进程。所以既不调用detach又不调用join,可能会导致crash 。(这个绝对是个槽点,C++20中jthread对这个槽点进行了修改··)
thread 析构源码
~thread()
{
if (joinable())
std::terminate();
}
不调用join或detach 导致crash代码
#include<iostream>
#include <thread>
using namespace std;
void NoParamDone()
{
std::chrono::milliseconds dura(25);
}
int main()
{
cout << "main thread id=" << std::this_thread::get_id() << endl;
thread thread_t;
cout << "thread_t joinable=" << thread_t.joinable() << endl;
thread_t = std::thread(NoParamDone);
//system("pause");
std::this_thread::sleep_for(chrono::seconds(10));
}
C++ 11 封装的sleep
C++ 11之前没有通用的休眠函数。c语言的sleep、usleep其实都是系统提供的函数,不同的系统函数的功能还有些差异。
在Windows系统中,sleep的参数是毫秒。
在Unix系统中,sleep函数的单位是秒
C++ 提供了跨平台的同一休眠函this_thread::sleep_for
this_thread::sleep_for(chrono::seconds(1));//sleep 1秒
this_thread::sleep_for(chrono::hours(1));//sleep 1小时
this_thread::sleep_for(chrono::minutes(1));//sleep 1分钟
this_thread::sleep_for(chrono::milliseconds(1));//sleep 1毫秒














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









