






对位姿误差的推导做个整理,不同的资料上求导的对象以及是左扰动还是右扰动会略有差别,注意区分。
推导中常用的公式:
1.李群的伴随性质

——From《视觉SLAM十四讲》式(4.48)
2.李群雅可比的近似公式
有时候在推导过程中会把雅可比近似为单位矩阵了。
 ——From State Estimation for Robotics Eq.7.91
——From State Estimation for Robotics Eq.7.91
各种推导:
1.十四讲/g2o
这是最常见的一种吧,具体推导可见十四讲以及g2o中 EdgeSE3Expmap类型Jacobian的计算——
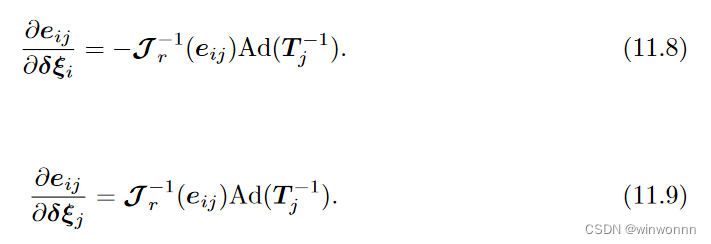 2.State Estimation for Robotics
2.State Estimation for Robotics
这里误差的定义中相乘的顺序跟十四讲不一样,取个逆的区别吧。
G
k
l
G_{kl}
Gkl就是误差雅可比,具体推导见书。
 3.MATLAB
3.MATLAB
代码如下。推导方式我觉得应该是跟State Estimation for Robotics 类似的,李群雅可比矩阵的近似项取多了一些,但是没想明白Mi和Mj的正负号?2021b这里的展开项跟想象的也有些不同,系数?为啥没有三次项呢?BTW,2021b中图优化默认的求导是用数值方法,并不是这个公式,难道不够好用吗?
function [e, Jaci, Jacj] = poseErrorSE3(Toi, Toj, Tij) %
%poseErrorSE3
Tio = robotics.core.internal.SEHelpers.tforminvSE3(Toi);
Tji = robotics.core.internal.SEHelpers.tforminvSE3(Tij);
e = robotics.core.internal.SEHelpers.veelogmSE3(Tji*Tio*Toj);
tau = e(1:3);
phi = e(4:6);
A = robotics.core.internal.SEHelpers.skew(phi);
B = robotics.core.internal.SEHelpers.skew(tau);
Mi = [-A, -B; zeros(3), -A];
Mj = [ A, B; zeros(3), A];
%2020a
Jaci = (eye(6) + 0.5* Mi)*robotics.core.internal.SEHelpers.adjointSE3(Tji);
Jacj = -(eye(6) + 0.5* Mj);
%2021b
%Jaci = (eye(6) + 0.5*Mi + (1/12)*MSq - (1/720)*MSqSq )*robotics.core.internal.SEHelpers.adjointSE3(Tji);
%Jacj = -(eye(6) + 0.5*Mj + (1/12)*MSq - (1/720)*MSqSq );
end
end
4.A Tutorial on Graph-Based SLAM
这样链式推导看起来是没毛病。文末的附录中给出了2D情况下的具体公式,但是没有3D的,似乎也没有看到哪个代码中用的是这个?
















 1077
1077











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









