







Index:.../3D-Matching/surface-based/find_surface_model.hdev
* ***********************************************************************
* Example for Surface-Based 3D Matching
*
* This example shows Surface-Based 3D Matching on data taken with a
* Time-of-flight camera (TOF/PMD).
* The model for the matching is created from a reference view of the
* object, i.e., no CAD model is used.
* The created model is then searched for in a number of 3D scenes.
*
* The example demonstrates how to use the operators
* xyz_to_object_model_3d,
* create_surface_model, and
* find_surface_model.
*
* ***********************************************************************
http://www.ti.com/ww/en/analog/3dtof/index.shtml
http://bcove.me/9nedcuu6
我自己思考了很久这个例程,咋说呢,这个例程非常有用。
在学习例程前,我建议把上面地址的视频先看了,虽然都是英文,但你先做一些学习应该可以搞懂。
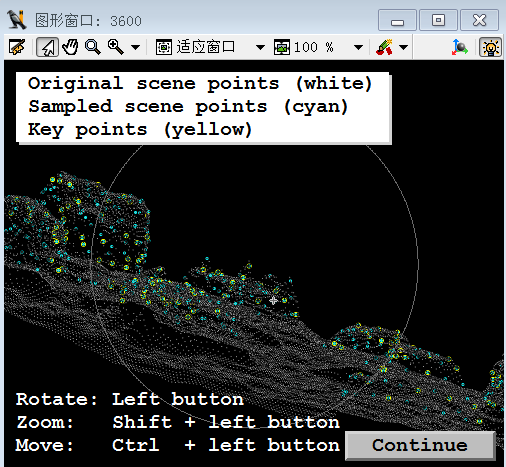
程序思路并不复杂,首先把TOF相机拍摄的一个图片读进来,把三通道拆分,然后形态处理,然后有个关键就是
xyz_to_object_model_3d — Transform 3D points from images to a 3D object model.用这个生产3d模型。
这个算子的帮助文档说的很明白,X放ROI,其他的就是普通的通道图像。
然后就是创建句柄,选取参数这些自不必说。
接下来又有一个新鲜的东西,visualize_object_model_3d
是一个库函数,帮助文档没看,头太晕了
输入参数大概看了一下,利用到3D句柄、相机参数等等,估计就是通过一个相机参数还有3D句柄来重现立体图像
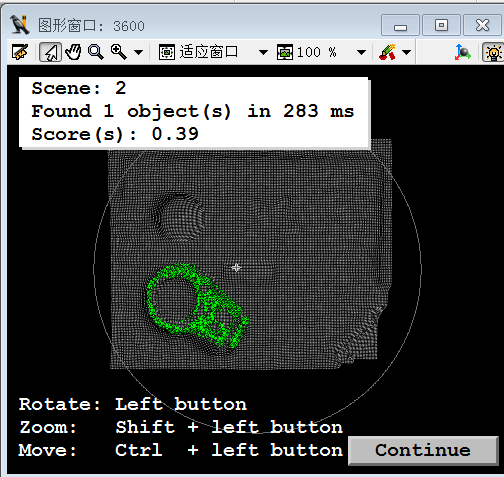
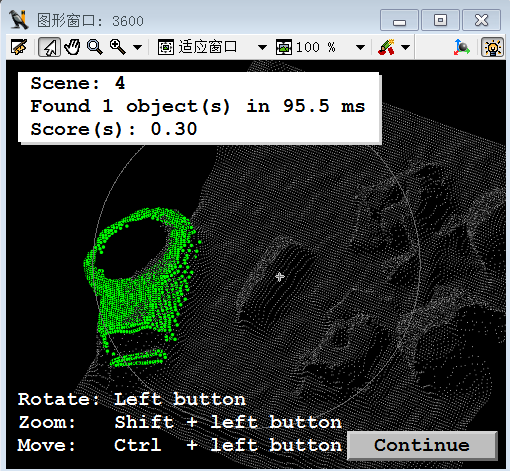
上面的都做完了,下面就是匹配了,和创建模板流程很相近。
总之这个例程,以后可移植性很好,已经就像3D重建和3D表面匹配。
我想玩这个,但是我们实验室没有TOF Camera,不过先写下来,以后有机会试试。
我应该找人要点CAD文件,立体的CAD也可以拿来做尝试。















 841
841

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









