







 PointCNN是山东大学提出的一种处理不规则点云数据的深度学习方法,通过学习X变换实现点云的置换不变性和特征加权。X-Conv算子是其核心,结合局部坐标和特征,用于点云的卷积操作。PointCNN架构通过层次卷积和膨胀卷积,适应不同层级特征的学习和感受野的增长,适用于点云的分类和分割任务。
PointCNN是山东大学提出的一种处理不规则点云数据的深度学习方法,通过学习X变换实现点云的置换不变性和特征加权。X-Conv算子是其核心,结合局部坐标和特征,用于点云的卷积操作。PointCNN架构通过层次卷积和膨胀卷积,适应不同层级特征的学习和感受野的增长,适用于点云的分类和分割任务。
目录
山东大学的工作,将卷积的思想运用到点云。
摘要
由于点云是不规则的和无序的,传统卷积无法直接作用到点云上,为了解决这个问题,我们从点云中学习一个X变换,以达成以下两个目的:1)获得点输入特征的权重;2)将点排列成一个潜在的正规顺序(实现了点云的置换不变形?)。之后就可以对点云X变换之后的特征进行经典的卷积运算。本文主要是对经典的CNN卷积进行推广,以从点云中学习特征,因此成为PointCNN。
介绍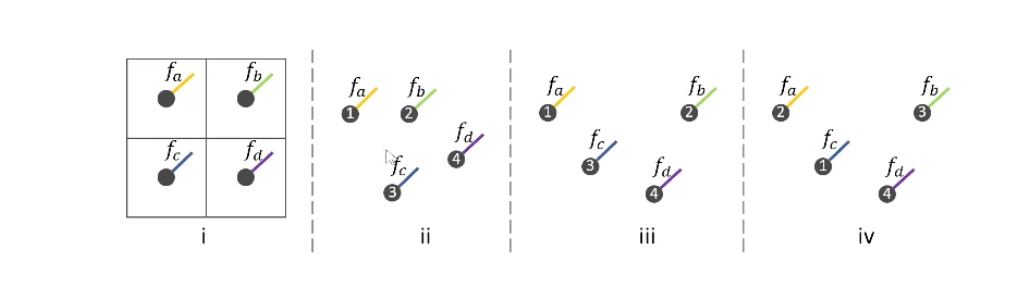
i是来自规则网格的卷积输入,ii~iv是来自点云的卷积输入。在(i)中,每个网格单元与一个特征相关联。在(ii-iv)中,从局部邻域采样点,类似于(i)中的局部小方格,每个点与一个特征、一个顺序索引和坐标相关联。
假设在ii~iv中,卷积的输入都是同样的c维输入特征的无序集合f = { fa, fb, fc, fd},如图, 传统的卷积是作用在2维图像数据上。图像中每个像素的顺序是固定的,也就是说数据是结构化存储的。直接使用conv2d就能从这种潜在的空间结构中获取信息。
而点云数据是点集,如果直接使用卷积会出现图中234多种情况
若直接使用卷积,则fii与fiii的计算结果是相等的,但是从图中可知,ii与iii点云形状排列其实是不同,这说明卷积无法获得点的空间位置信息。
而f3与f4的计算结果不等,但是图iii与图iv是相同的点集,必须得到相同的计算结果才合理,这说明卷积无法适应点集的N!种排列。
在本文中,作者提出利用多层感知器,从K个点坐标中学习一个K*K大小的X变换矩阵,即X=MLP(p1,p2,…,pK),我们的目标是利用它来同时加权和实现输入特征的置换不变,然后再应用传统的卷积处理特征。这个过程称为X-conv,它是PointCNN的基本构建块。
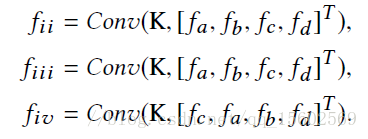
图1中(ii)、(iii)和(iv)的x - conv可以用以下公式表示:

其中X是一个4*4的矩阵(类似于线性代数上面的初等矩阵,根据左行右列原则,实现对fa~fd的顺序进行重排),K=4(即点数)
由于Xii和Xiv是从不同形状的点学习的,它们可以不同,以便相应地加权输入特征,以实现fii ≠ fiii ; 对于Xiii和Xiv,可以通过学习使得满足
![]()
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 438
438











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









