







让你的小车跑起来吧
CarRacing-v0环境是一个很简单的类似于循迹小车的问题,如下图所示:
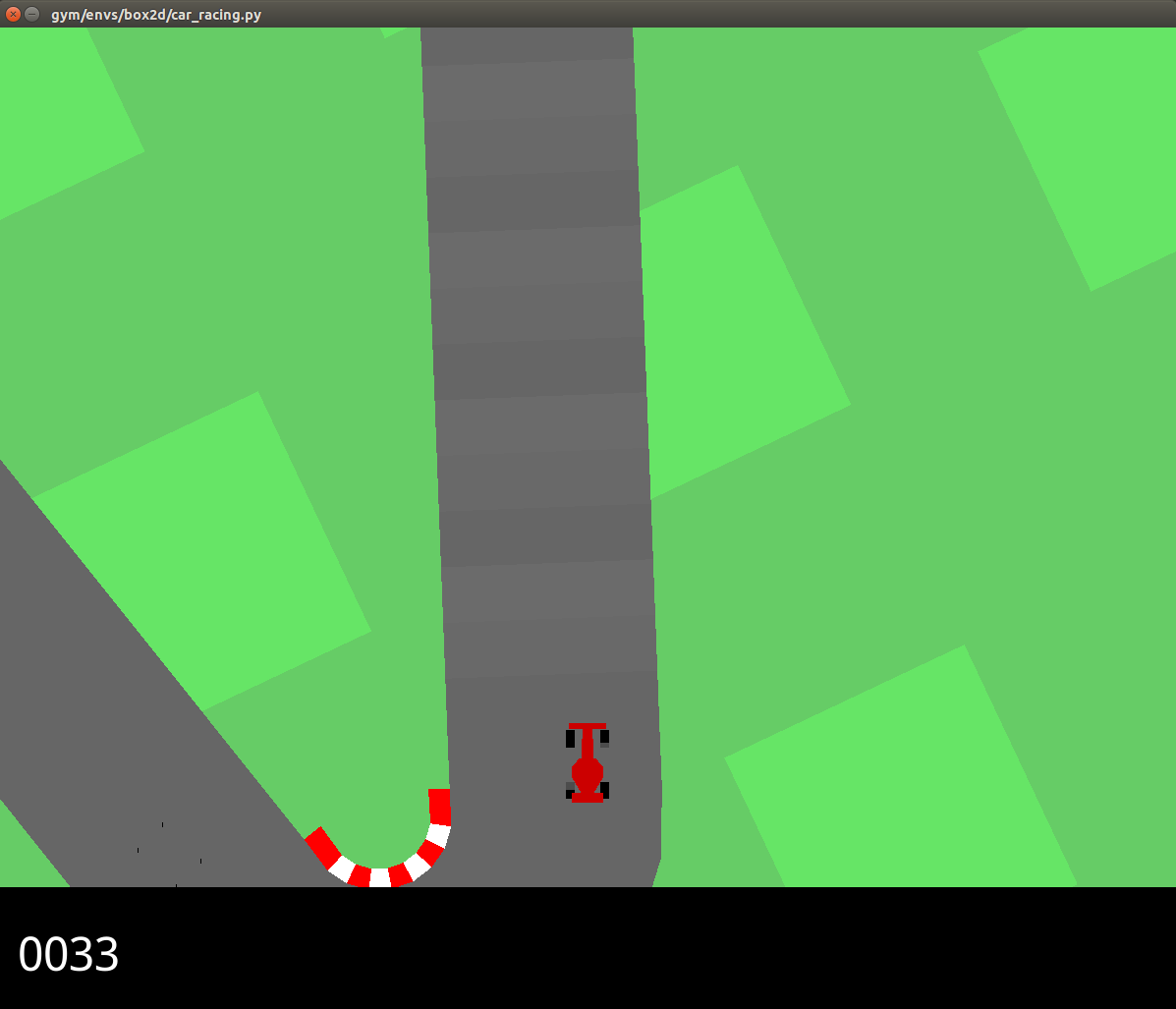
我们的目标就是控制小车在轨道内跑起来,并且尽可能快地飞驰。
该环境给出了一个最简单的连续控制任务,它要求我们从俯视视角所得到的像素中进行学习,所以state就是96*96的图像,当然,我们在训练神经网络的时候,可以对环境给出的observation再取一个降采样,从而降低神经网络输入的维数。环境给予智能体的奖励分为两个部分:一个是随着时间的流逝,会一直付出代价,-0.1/frame,如果按照30frams/s来算的话,就是-3/s;第二部分是经过赛道上铺的瓦片所获得的奖励,每经过一个瓦片都将给予智能体1000/N的奖励,N为轨道上的总瓦片数,我们放大局部来看一下瓦片在哪:

看出来了么?小车前方(小车方向朝上)有很多一道一道的,那就是瓦片,小车经过之后就会消失,这一点我们从小车后方没有瓦片就可以看出来,此外,如果我们的小车通过了赛道上所有的瓦片,则称这一个episode完成了。在render出来的环境的最下方有一些指示器,从左到右依次为:小车实际速度、四个ABS传感器(对,就是用在防抱死系统中的传感器,用于监测轮速)、方向盘的位置、陀螺仪。
当然,该环境中的小车也可以用离散控制,我们可以通过参数来选择连续控制或离散控制。接下来我们分析该环境下state、observation、action所包含的具体数据。
self.action_space = spaces.Box( np.array([-1,0,0]), np.array([+1,+1,+1])) # steer, gas, brake
self.observation_space = spaces.Box(low=0, high=255, shape=(STATE_H, STATE_W, 3))self.state = self._render("state_pixels")
return self.state, step_reward, done, {}
if action is not None:
self.car.steer(-action[0])
self.car.gas(action[1])
self.car.brake(action[2])def steer(self, s):
'control: steer s=-1..1, it takes time to rotate steering wheel from side to side, s is target position'
self.wheels[0].steer = s
self.wheels[1].steer = s
所以在steer时语句为self.car.steer(-action[0]),当然,也可以修改steer()函数,self.wheels[0].steer=s,self.wheels[1].steer=s即可。
至于油门的控制的话:
def gas(self, gas):
'control: rear wheel drive'
gas = np.clip(gas, 0, 1)
for w in self.wheels[2:4]:
diff = gas - w.gas
if diff > 0.1: diff = 0.1 # gradually increase, but stop immediately
w.gas += diff再来看看小车的刹车系统:
def brake(self, b):
'control: brake b=0..1, more than 0.9 blocks wheels to zero rotation'
for w in self.wheels:
w.brake = b至于reward,我们前面已经提到了,现在举个例子,如果我们在732帧里完成了任务,即通过了所有瓦片,则奖励为1000-0.1*732=926.8。值得注意的是,该环境并不考虑油耗,所以,小车可以尽可能快的通过所有瓦片。episode结束的标志除了通过所有瓦片之外,还有一种结束标志就是碰撞到游戏场地的边界,此时将给予-100的奖励作为惩罚。
最后,打印出CarRacing-v0环境的observation space和action space:
import gym
env=gym.make('CarRacing-v0')
print env.observation_space
print env.action_space

好了,介绍就到这里,我们可以自己尝试着玩一下:
python gym/envs/box2d/car_racing.py
















 4512
4512

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









