







如本节题目所言,机载激光扫描已被用来进行海床和沿海地区的制图工作,早起的系统都是激光轮廓仪,机载脉冲激光测距设备能够基于回波信号测量传感器到海床和海面的距离,这些实验性设备呗美国、瑞典、加拿大、澳大利亚等过生产出来,在1990年LaRoque和West的文章中,对这一应用进行了详细介绍。在1980年代,早期的剖面仪系统经过改造,新的系统具备了扫描机制,这些系统包括:由NASA、NOAA和美国海军联合资助的项目AOL、澳大利亚海军武器研究机构研发的WRELADS-2,Optech也开展了相关研究,早期产品为LARSEN-500系统,该系统由加拿大水文局和加拿大遥感中心资助。Optech公司还参与了瑞典国防研究机构的FLASH-1系统的研发。在1990年代早期,所有的所有这些早期的努力都随着第一个SHOALS系统的开发、交付以及全面投入运行而取得了成果,该系统由Optech为美国陆军单位生产。Optech同萨博共同参与了Hawk Eye侧身激光扫描系统的开发,该系统为瑞典国防部开发,并进入瑞典海事部门服役。与此同时期,澳大利亚研制LADS(Laser Airborne Depth Sounder )系统,进入澳大利亚海军服役。美国、加拿大、瑞典和澳大利亚直到现在也是在机载侧身激光扫描仪领域站在最前列的国家。除了这几个国家,一些实验系统在俄罗斯、中国也被建造起来,虽然上面提到的所有这些系统都是为了满足政府国防机构和水文测量服务的要求而建造的,但现在有三家航空测深激光扫描系统的商业运营商,在全球范围内为政府机构和商业公司提供服务。
2.6.1.Laser Bathymetric Measurements
使用机载激光扫描仪测量海洋(或湖泊)表面以下海床(或湖床)深度的基本原理通常涉及使用两种激光测距仪,分别是红外波段和绿光波段同时发射不同波长的脉冲。红外辐射从水面反射,而绿光波段的脉冲进入并穿过水体,由海床反射回测距仪(如图2.47)。
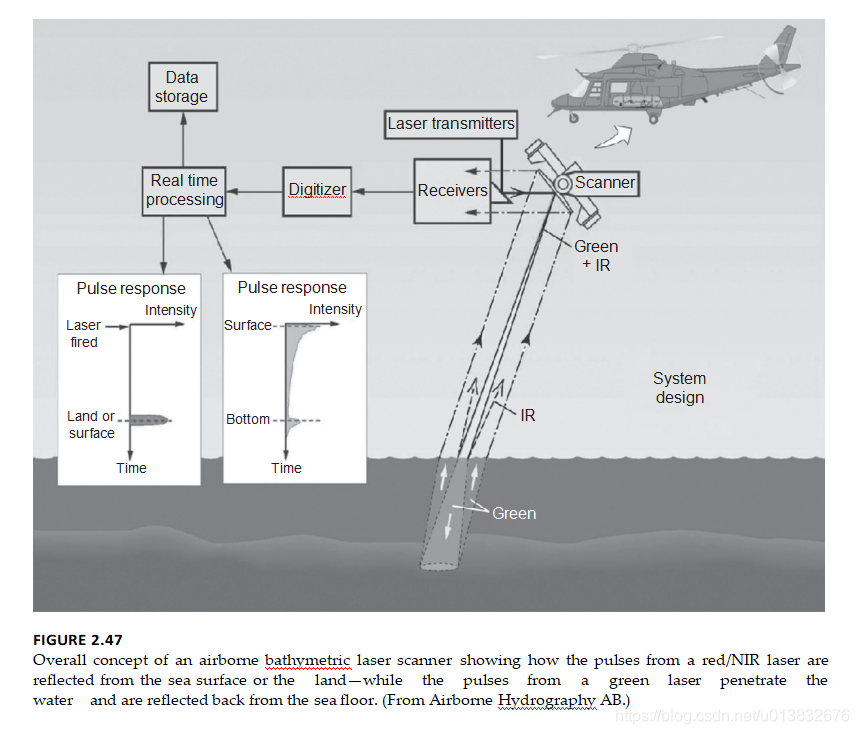
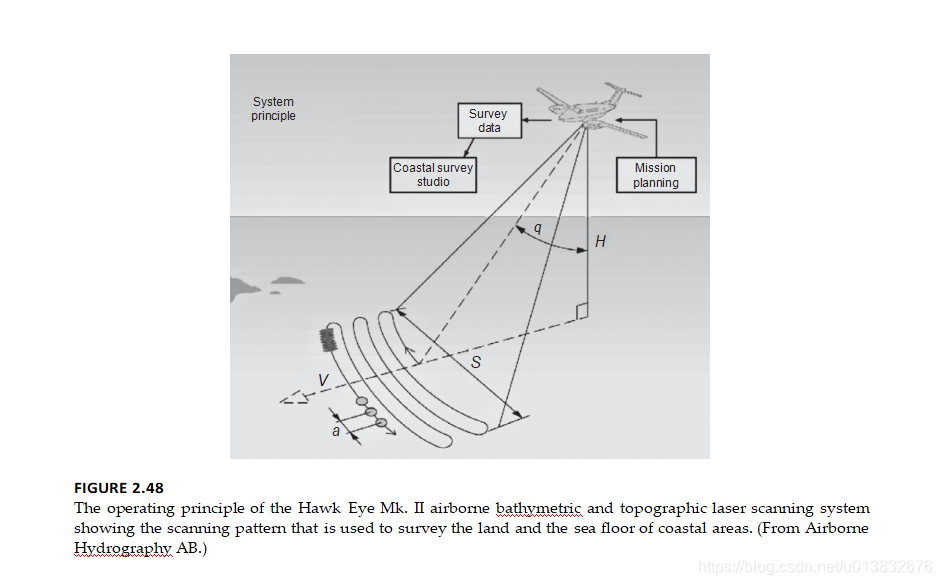
实际的测量深度一般限制在25-70m,影响因素主要是传感器的性能和水体的清浊程度,然后,两个波长的反射辐射由位于测距仪内的适当探测器进行测量,并测量两个脉冲发射和接收信号之间的时间差。通过这些对经过时间的测量,可以得出相应的范围,分别知道辐射通过空气和水的速度。虽然这些信息提供了深度值,并沿飞行线创建了一个简单的深度剖面,在增加了横向扫描机制的情况下,可以覆盖海面和海床的一条或一片区域。 与机载地形激光扫描仪一样,机载平台和安装在其上的测深激光扫描仪的位置和姿态由集成的GPS/IMU系统提供。(见图2.48)
2.6.2.System Suppliers
如上所述,目前只有少数几个机载测深激光扫描仪的建造者和供应商。
2.6.2.1.Optech
上文介绍Optech在最初开发机载测深激光扫描仪方面发挥了主导作用,它要么建造了一些早期系统的主要部件,要么提供了这些系统的主要部件,这些系统是的用户都是一些国家机政府机构,Optech自1990年以来建造的几个完整的测深激光扫描仪系统都有SHOALS命名的,这是Scanning Hydrographic Operational Airborne Lidar Survey system首字母缩写。 该系列系统得到了稳定的发展,分别命名为SHOALS-200、SHOALS-400、SHOALS-1000和SHOALS-3000。
1993年向USACE提供的原始SHOALS系统使用两个脉冲激光器,分别在红外波段(l=1064nm)和绿光波段(l=532nm)工作,选择了再空气及水面交界位置探测以及水探测效果更优的频率。 该系统有五个接收信道。其中两个测量并记录了每个反射绿色脉冲的波形(不同时间的反射能量值),而第二对记录了每个反射红外脉冲的波形。两组测量都是使用两个接收信道(每个接收信道记录适当的波形)是为了便于区分发生反射的实际对象是什么。剩下的第五个通道测量并记录了绿色激光激发地表水分子所产生的拉曼能量。两种激光器的功率级分别为红外激光器15mJ和绿色激光器5mJ。
最初的SHOALS系统的激光脉冲重复频率为200Hz,因此命名为SHOALS-200。它是用贝尔直升机作为机载平台飞行的。1998年,对该系统进行了改进升级,包括安装了一种新的激光,将脉冲频率增加一倍,达到400Hz,因此命名为SHOALS-400。该系统安装在双水獭固定翼飞机上。 SHOALS系统的定位使用的是双频GPS接收机结合当地基站或者使用Fugro Omni STAR系统进行差分解算,以及提供所需姿态测量的IMU。 所获得的水平精度±1至3米,而垂直精度为±15厘米。扫描模式是由激光向前与垂直倾斜20°的方向上,扫描机构在飞机前面产生一个弧形扫描线。 激光距离测量由一个摄像机补充,该摄像机连续记录被覆盖区域的视频帧图像。同时配套的摄像机能够记录覆盖区域的影像信息。
2003年,Optech推出了其SHOALS-1000型号,海军是其第一个用户。 虽然原则上,基本系统和测量原理与以前的SHOALS型号保持不变,但这一新型号的特点是以1000Hz(红外)和400Hz(绿色)的扫描速度实现更高运行频率。前者旨在测量沿海陆地地区地形和水面的高程数据。新系统的重量也从405kg降低到了205kg,功率为60A在28V,以前的-200和-400型号的工作电压为28v,电流为150A和120A。SHOALS-1000是CHARTS项目的(Compact Hydrographic Airborne Rapid Total Survey))一个主要组成部分,该方案正在由 Joint Airborne LiDAR Bathymetry Technical Center of Expertize (JABLTCX)实施,该中心由USACE、NOAA和美国海军的NAVOCEANO组织组成,总部设在密西西比州圣路易斯湾的斯坦尼斯中心。 另有一套SHOALS-1000系统是向日本海岸警卫队的水文和海洋学测量机构提供的, Fugro Pelagos公司和Opetech公司合作运营了一套SHOALS-1000用于测深业务,如图2.49所示。
Fugro还通过其John E.Chance子公司代表JABLTCX经营SHOALS-200和-400型号。
2006年,SHOALS-3000以SHOALS-300的形式进行了进一步的开发,并交付给美国海军,如图2.50所示。

从本质上说,这是对SHOALS-1000的升级,随着红外(地形)激光的测量速率增加到3000赫兹,它的性能得到了提高。这就允许了系统能够以更高的作业高度来工作,同时获取了更大的扫描带宽,在400m高度上激光光斑面积4×4米,这个新版本的SHOALS系统再次成为整个CHARTS系统的主要组成部分。该系统不仅包括升级后的SHOALS系统,它还包含了由另一家加拿大公司 ITRES Research公司提供的CASI-700推扫相机。由此产生的高光谱图像能够支持绘制主题地图和图表,来反映海底的沙、泥、岩石、珊瑚、海草等区域。
2.6.2.2.AHAB
上文中介绍过的瑞典的AHAB公司( Airborne Hydrography AB company)也对机载激光测深系统长期保持兴趣,这些兴趣的转化就是在1980年代设计生产了Flash-1系统。 在1990年代初,Saab集团收到了开发Flash系统替代品的合同,并在Optech作为其主要分包商的帮助下,分别于1994年和1995年向瑞典海军和瑞典海事局交付了两个鹰眼系统。这两个系统中的第一个后来卖给了印度尼西亚海军,由Blom制图组织(Blom mapping organization)运营,对印度尼西亚沿海水域进行全面调查和制图。第二个系统用于2003年之前由Hydrographics Unit of the Maritime Administration在瑞典沿海进行的测绘,鉴于Optech在其发展中所起的重要作用,这两个鹰眼系统在许多方面与初期的SHOALS系统非常相似。
2002年,萨博将产品权出售给鹰眼系统的三名前萨博雇员,他们参与了鹰眼扫描仪的开发。 他们成立了AHAB公司,并开始开发新的鹰眼II系统,并承担上述顶Topeye II系统升级工作的一部分。 第一个鹰眼II系统于2005年底交付给由英国共同拥有的Admiralty Coastal Surveys AB。该公司一直在全球范围内提供测深测绘服务,并已成功地进行了一些测绘项目(图2.51)。 然而,Blom公司收购了它的合作伙伴,现在正在为自己运营这个系统。
用于鹰眼II测距仪的红外(l=1064n m)和绿色(l=532n m)脉冲激光器是从德国公司购买的。 然后,他们被与光学,接收器和AHAB自己制造的电子系统进行了集成和开发(图2.52)。
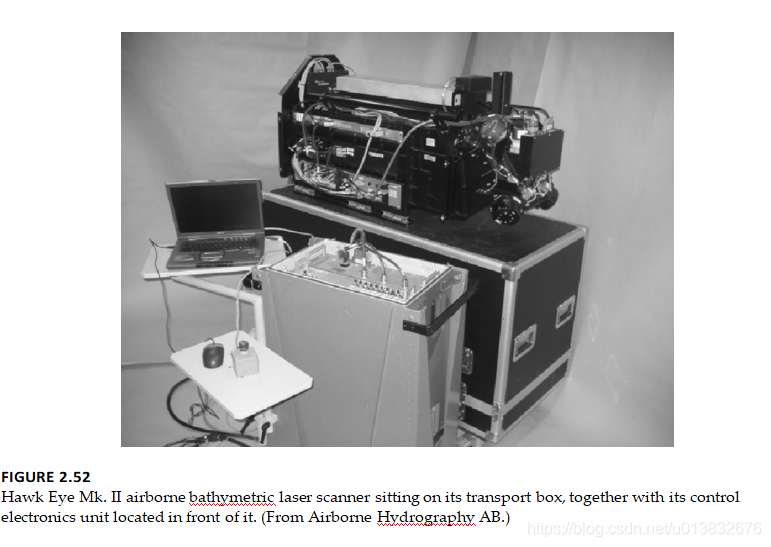
红外(地形)激光器的激光脉冲速率为64kHz,绿色(水深)激光器的激光脉冲速率为6kHz。测距仪从垂直于机体的下向向前倾斜15°-20°。鹰眼II的位姿系统采用的是一套Applanix的 POS/AV 410 GPS/IMU系统。一个小画幅的(200万像素)的数码相机与激光扫描系统一起使用。该系统的总重量为180公斤。鹰眼II进行IHO Class I等级的测绘工作,通常的作业高度是200-300m,测量的数据可以实时显示在系统监视器上,如果需要,可以通过无线通信链路实时传输到岸上站或勘测船。数据处理是使用AHAB自己的Coastal Survey Studio (CSS)软件进行的,在此之后,数据可以传递到行业标准制作软件,如CARIS,以生成最终图表。
2.6.2.3.Tenix
继1980年代最初的WRELADS系统之后,RAN于1989年向两家澳大利亚公司-必和必拓工程公司和远景系统公司-签订了建造LADS的合同。 该系统于1993年完成并投入使用。 LADS系统安装在Fokker Friendship F27-500型飞机上,配备了双涡轮螺旋桨发动机。 自1993年投入使用以来,它一直持续用于测深调查,主要是在澳大利亚北部和东部沿海地区。 在1998年,第二套系统-LADS-II-开始服役,被安装在De Haviland Dash-8双涡轮螺旋桨飞机上(图2.53)。
第二个系统由Tenix公司的一个部门进行商业运作,Tenix公司是澳大利亚的一个大型国防承包商,它买下了最初建造LADS系统的伙伴关系。Tenix LADS公司还为原RAN LADS系统提供支持,该系统由Tenix和RAN人员组成的团队共同运营。 Tenix LADS-II系统已在世界各地运行,包括为诺阿进行阿拉斯加沿海水域的广泛测深测绘;为英国、爱尔兰和挪威的官方机构进行沿海地区测绘;绘制和绘制卡塔尔和迪拜周围的海洋地图,以及在澳大利亚水域进行测绘,以补充由RAN的LADS系统进行的业务成果(图2.54)。
与SHOALS和鹰眼系统一样,LADS系统使用红外和绿色激光来测量深度。 然而,LADS系统的红外激光指向垂直向下,而绿色激光指向向前,两者都安装在稳定的平台上。 用于LADS-II系统测距仪的激光脉冲速率为900Hz。LADS系统包含一个GPS/IMU系统,用于测量和生成所需的位置和姿态数据。 LADS-II扫描仪的飞行高度为500米,扫描宽度为240米,点间距为5m*5m( a sounding density of 5 × 5 m.)。原文撰写时,根据RAN网站的说法,原RANLADS系统正在升级更有能力的激光系统,具有更大的位置能力,更大的深度范围和更详细的海底覆盖范围。
2.6.2.4.NASA
美国宇航局的WFF设计和建造了其EAARL(Experimental Advanced Airborne Research Lidar)系统,主要用于海洋科学研究,而不是在本节中描述的以前的系统中使用的水深数据的系统收集(图2.55)。
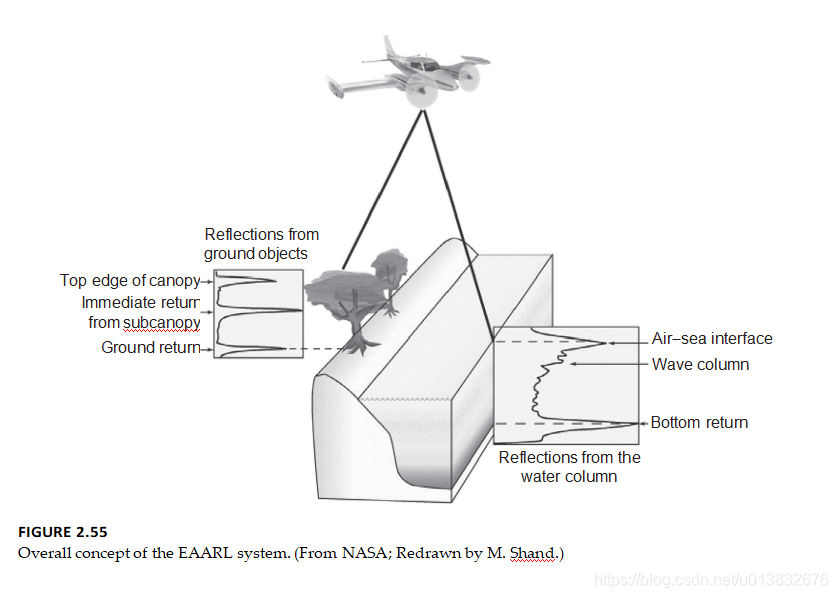
EAARL系统自2001年开始运行。它不同于先前描述的系统,因为它使用的是单个(绿色)激光器,而不是这些先前系统的双(红外、绿色)激光器。激光器以532nm波长发射脉冲,功率相对较低(70mJ);脉冲速率高(3000Hz);产生良好的准直脉冲,在水面上产生15~20cm直径的激光脚点。然而,较低的功率也意味着可以测量的最大深度为20-25米。 激光测距仪垂直向下指向,扫描机构及其振荡镜产生相应的深度测量模式。 当飞行高度为300米(1000英尺)时,EAARL系统覆盖240米宽的条带,每个扫描线有120个测深返回,在这些测量点之间有2米的间距。扫描速率为20Hz。 该系统的总重量相对较低,为114公斤(250磅),其工作要求为28V直流电源400W功率。
EAARL系统的接收端非常独特,包括四个亚纳秒光探测器,直接连接到四个高速波形数字化器。四个光电探测器中的每一个都接收从飞机正下方的海洋和海底表面反射的光子的一部分。最敏感通道接收90%的光子,而最不敏感通道接收0.9%。两个中间通道共用其余部分。
在激光脉冲被触发之前的几个纳秒,所有四个通道都被同步数字化到一个8位的水平,并在1600ns之后结束。每个发射的激光脉冲都只有一小部分被光纤探针接收,并通过一个光电探测器被识别,以此来记录脉冲产生时的形状、时间点、脉冲振幅,接收的反射能量也被数字化,最终的波形被以1ns的间隔来进行采样,通过实时分析来定位关键特征,例如,数字化传输脉冲和第一次和最后一次返回。水面反射的能量较强,通常会使接收器中最敏感的通道饱和。 在这种情况下,范围将由最小灵敏度通道解决。 来自海底的反射将是微弱的,因此,范围将被解决使用最敏感的通道。在激光脉冲的足迹内,来自不同植被层的多次反射将产生具有复杂形状的波形。 实时处理器自动适应每个返回的波形,只记录波形的相关部分,以便进一步处理。
除了实际的激光测距仪之外,EAARL系统还包括两个数字摄像机,它们都以1Hz的速率获取图像。 第一个是RGB彩色相机,产生的图像地面采样距离(GSD)为70-90厘米。 第二个相机产生假彩色(绿色红色近红外)图像,GSD为20厘米。 该系统的位姿系统包括两个双频GPS接收机和一个集成的微型数字IMU,共同确保每个激光测量的亚米级定位精度。 波形数字化仪的1ns时间分辨率相当于空气中的13.9厘米和水中的11.3厘米。系统的实际测距精度为±3-5厘米,而水平定位精度被为1米。EAARL系统已被广泛用于南佛罗里达、波多黎各和加勒比海各美国岛屿的许多沿海地区的研究制图。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









