







o_1背包用回朔法求解时,其解空间是子集树。
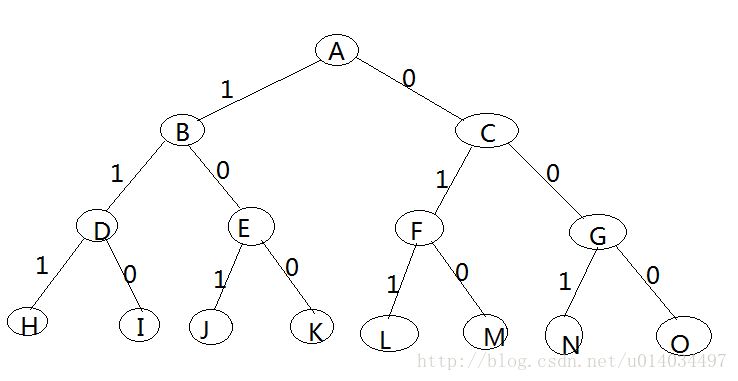
回朔法从开始节点(根节点)出发,以深度优先方式搜索整个解空间。这个开始节点成为活结点,同时也成为当前的扩展节点,在当前的扩展节点处,向纵深方向搜索至一个新节点,这个新节点也就成为了新的活结点,并成为当前扩展节点。如果当前扩展节点处不能在向纵深方向移动,则当前扩展节点也就成为死结点。
此时,应往回移动(回朔)至最近的一个活结点处,并使这个活结点成为当前的扩展节点。
回朔法以这种方式递归的在解空间中搜索,直到找到所要求的解或解空间中已无活结点时为止。
//0-1背包问题 回溯法求解
#include <iostream>
using namespace std;
template<class Typew,class Typep>
class Knap
{
template<class Typew,class Typep>
friend Typep Knapsack(Typep [],Typew [],Typew,int);
public:
Typep Bound(int i); //计算当前节点处最大价值
void Backtrack(int i);
Typew c; //背包容量
int n; //物品数
Typew *w; //物品重量数组
Typep *p; //物品价值数组
Typew cw; //当前重量
Typep cp; //当前价值
Typep bestp;//当前最后价值
};
template<class Typew,class Typep>
Typep Knapsack(Typep p[],Typew w[],Typew c,int n);
template <class Type>
inline void Swap(Type &a,Type &b);
template<class Type>
void BubbleSort(Type a[],int n);
int main()
{
int n = 3;//物品数
int c = 30;//背包容量
int p[] = {0,40,25,25};//物品价值 下标从1开始
int w[] = {0,16,15,15};//物品重量 下标从1开始
cout<<"背包容量为:"<<c<<endl;
cout<<"物品重量和价值分别为:"<<endl;
for(int i=1; i<=n; i++)
{
cout<<"("<<w[i]<<","<<p[i]<<") ";
}
cout<<endl;
cout<<"背包能装下的最大价值为:"<<Knapsack(p,w,c,n)<<endl;
return 0;
}
/*
最坏有2^n即所有节点都计算下上界,故总的时间复杂度O(n*2^n)
*/
template<class Typew,class Typep>
void Knap<Typew,Typep>::Backtrack(int i)
{
if(i>n)//到达叶子节点
{
bestp = cp;
return;
}
if(cw + w[i] <= c)//进入左子树
{
cw += w[i];
cp += p[i];
Backtrack(i+1);
cw -= w[i];
cp -= p[i];
}
if(Bound(i+1)>bestp)//进入右子树
{
Backtrack(i+1);
}
}
/**
计算上界O(n)的时间复杂度
*/
template<class Typew, class Typep>
Typep Knap<Typew, Typep>::Bound(int i)// 计算上界,即当前价值加上所有剩余价值
{
Typew cleft = c - cw; // 剩余容量
Typep b = cp;
// 以物品单位重量价值递减序装入物品
while (i <= n && w[i] <= cleft)
{
cleft -= w[i];
b += p[i];
i++;
}
// 装满背包
if (i <= n)
{
b += p[i]/w[i] * cleft*1.0;
}
return b;
}
class Object //
{
template<class Typew,class Typep> //这样写也可以!!!!!!!
friend Typep Knapsack(Typep[],Typew [],Typew,int);
public:
int operator <= (Object a)const
{
return (d<=a.d);
}
private:
int ID;
float d;
};
template<class Typew,class Typep>
Typep Knapsack(Typep p[],Typew w[],Typew c,int n)
{
//为Knap::Backtrack初始化
Typew W = 0;
Typep P = 0;
Object *Q = new Object[n];
for(int i=1; i<=n; i++)
{
Q[i-1].ID = i;
Q[i-1].d = 1.0 * p[i]/w[i];
P += p[i]; //这两个纯粹是考虑到能装入所有物品的情况
W += w[i];
}
if(W <= c)//装入所有物品
{
return P;
}
//依物品单位重量价值排序
BubbleSort(Q,n); //为了便于在排序,便重载了object类的比较运算符
for( i=1; i<=n; i++)
{
cout<<Q[i-1].ID <<endl;
cout<<Q[i-1].d<<endl;
}
//进行回朔前的准备
Knap<Typew,Typep> K;
K.p = new Typep[n+1];
K.w = new Typew[n+1];
for(i=1; i<=n; i++)
{
K.p[i] = p[Q[i-1].ID]; //建立价值和容量数组
K.w[i] = w[Q[i-1].ID];
}
K.cp = 0; //初始化当前背包
K.cw = 0;
K.c = c;
K.n = n;
K.bestp = 0;
//回溯搜索
K.Backtrack(1);
delete []Q;
delete []K.w;
delete []K.p;
return K.bestp;
}
template<class Type>
void BubbleSort(Type a[],int n)
{
//记录一次遍历中是否有元素的交换
bool exchange; //这个的设定的确精辟
for(int i=0; i<n-1;i++)
{
exchange = false ;
for(int j=i+1; j<n; j++)
{
if(a[i]<=a[j])
{
Swap(a[i],a[j]);
exchange = true;
}
}
//如果这次遍历没有元素的交换,那么排序结束
if(false == exchange)
{
break ;
}
}
}
template <class Type>
inline void Swap(Type &a,Type &b)
{
Type temp = a;
a = b;
b = temp;
}
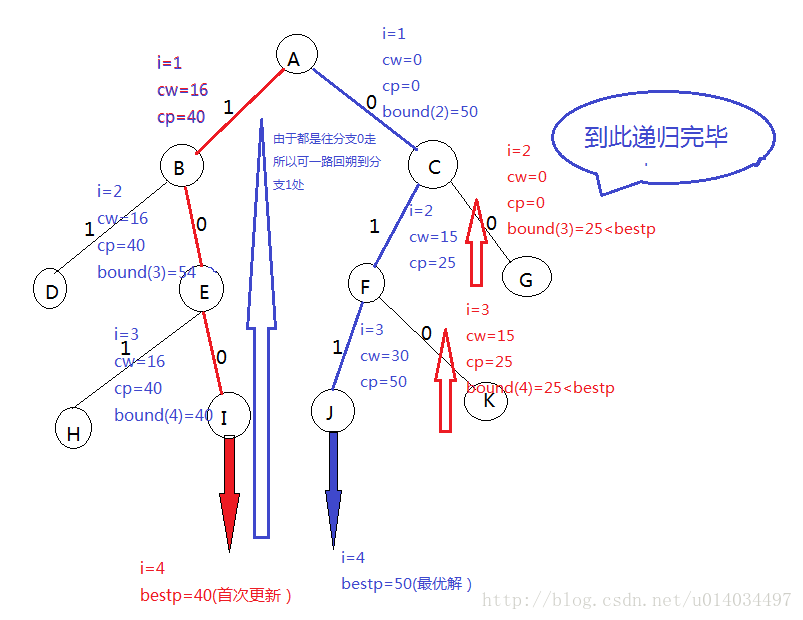
ps:每次往0分支走时,都会先计算下一层的上界bound(i+1),如果大于bestp,继续深度扩展,否则向上回朔,直到解空间中再无扩展节点。














 1178
1178











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









