







相机模型

如图:假设P是现实世界中的一个点,P是三维世界中的点
Pr(Xr,Yr,Zr)
光心O视作摄像头
Pc(Xc,Yc,Zc)
在相机平面中,Pc的坐标为(0,0,0)
在物理成像平面
Pp(Xp,Yp,0)
在像素平面
P'(Xp',Yp',0)
但是!!!
到了像素平面,坐标就不一样了,像素平面坐标顶点(最左上角)才是原点,此时P'坐标应为P'(u,v,0)
什么是齐次坐标
齐次坐标就是将一个原本是n维的向量用一个n+1维向量来表示,是指一个用于投影几何里的坐标系统,如同用于欧氏几何里的笛卡儿坐标一般。
个人理解就是二维凑三维,三维凑四维,以此类推
什么是欧氏变换
欧几里得变换也称为欧式变换、刚性变换,是一种较为基本的变换,通过欧几里得变换,可以改变物体的空间位置,却不改变物体的形状、大小。
说白了,就是平移和旋转,比如我在死亡的边缘疯狂横跳,旋转,跳跃,画着圈,哎~我还是我,你能拿我怎么办?(我又跳进来了,打我呀,打我呀,笨蛋)
手动分割线
有人要问了(其实没人问,强行给自己加戏而已),为什么介绍介个?
诶!小盆友,你发现了华点.
凑数嘛,假设我获取了P'点,那么现实中的点是不是就能求了?就是干这个用的.
整硬菜!(比我的嘴还硬)
从真实世界的坐标系,转换到像素的坐标系
从真实世界坐标系到像素坐标系,总共分几步?
四步:真实世界坐标系→相机坐标系→物理成像坐标系→像素平面坐标系
这位同学答的很好,奖励请老师搓个澡!
好,接下来我们来分解一下
世界坐标系到摄像机坐标系:
先看个公式:

这是从真实世界坐标系转化成相机坐标系,中间的2*2矩阵代表的是平移和旋转的过程(欧式变换),公式看的懂吗?
看不懂(我TM也看不懂)
那么如何理解这个东西呢
现实中间的某个点,要想找到在相机坐标系的对应点,那么要有参照吧,但是这个参照总不能用现实世界的坐标系吧,相机又不知道,所以要建立一个对应的关系,把现实世界的坐标经过欧式变换,变成相机坐标系.那么现实中的点,就可以在相机坐标系中找到.
举个栗子,每款饮料的总含糖量不一样,那么怎么对比呢,就有了一个NRV标准,每100ml含糖量占NRV的比重,这样就能看出来.
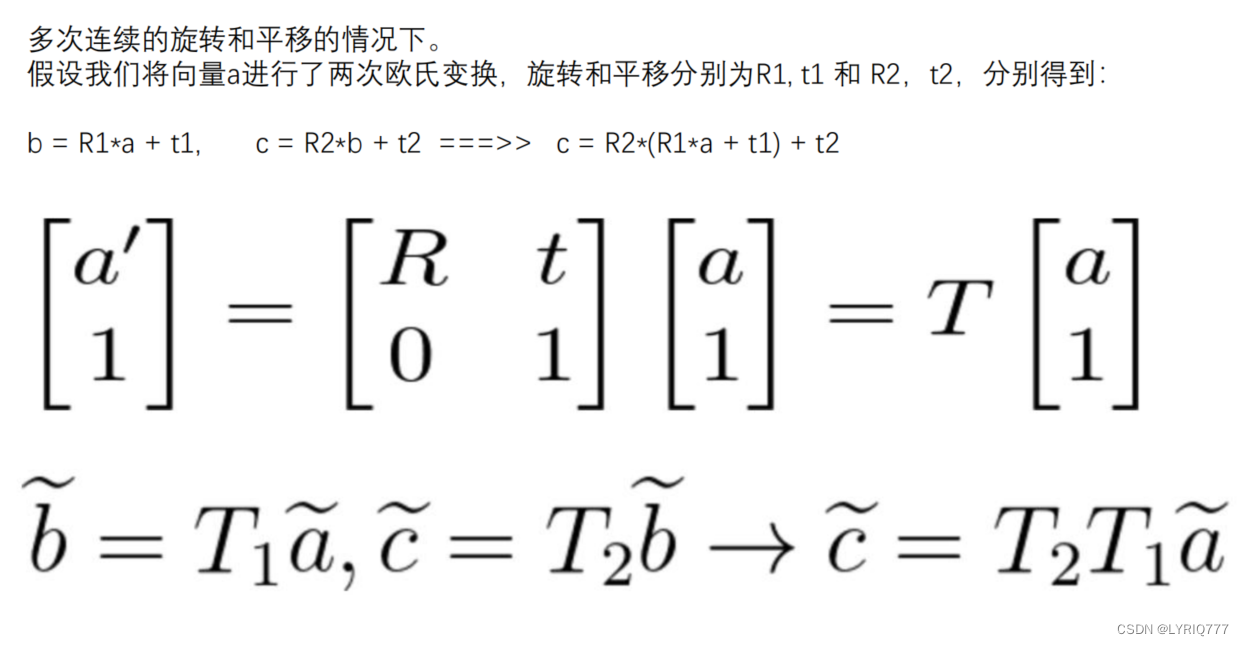
来看下这个,其中波浪号a,波浪号b代表齐次坐标, 结合上面的公式,是不是就好理解了
矩阵乘法不知道的,自己百度(狗头)
摄像机坐标系到图像物理坐标系
下面的内容就比较好理解了,少废话,直接上图:
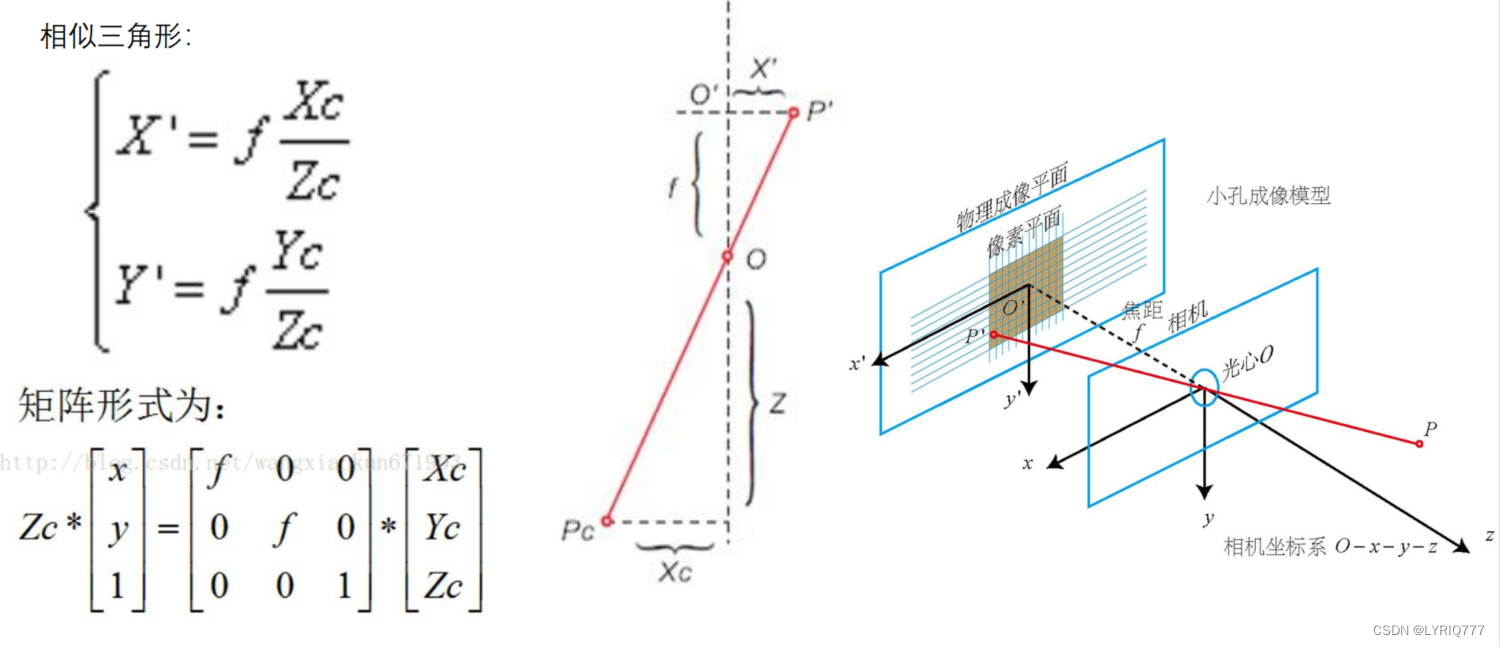 这时候就是通过相似三角形原理,进行比例变化就行了,还是建立不同坐标系的对应关系.
这时候就是通过相似三角形原理,进行比例变化就行了,还是建立不同坐标系的对应关系.
图像物理坐标系到图像像素坐标系
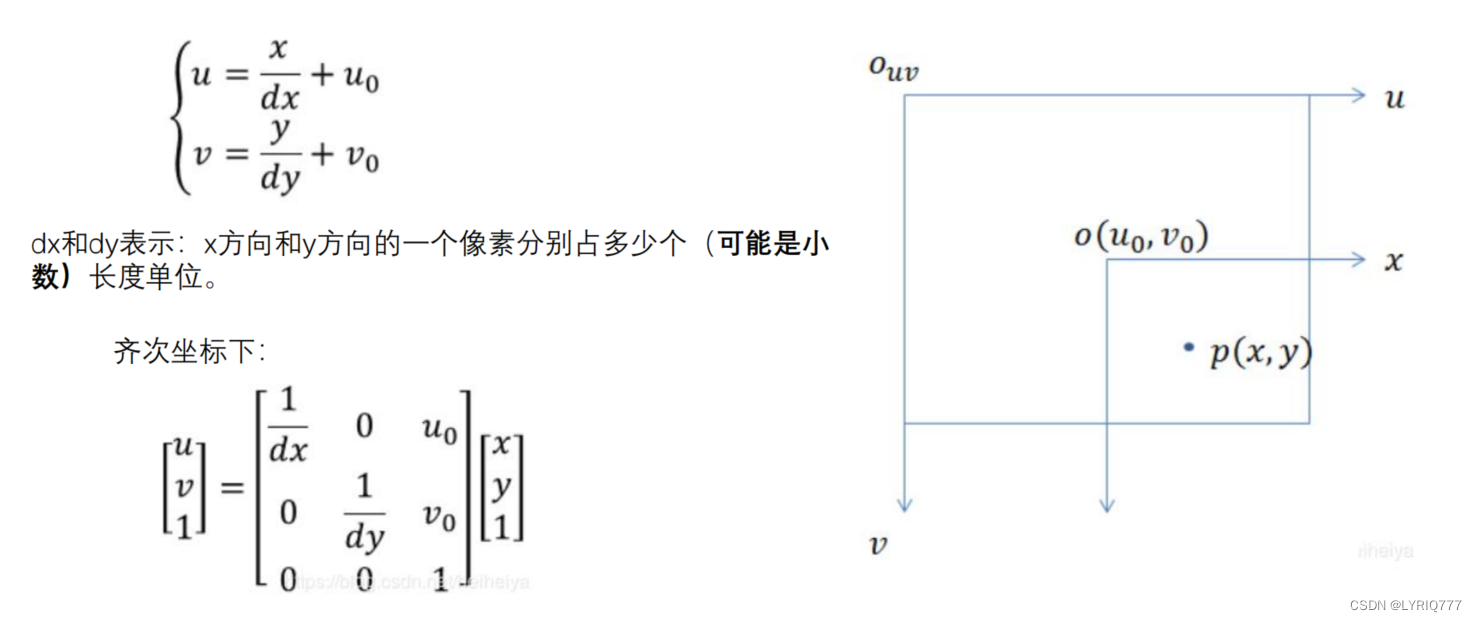 这个跟简单了,由于物理坐标和图像坐标系是在一个平面内的,直接按比例进行缩放就行了.
这个跟简单了,由于物理坐标和图像坐标系是在一个平面内的,直接按比例进行缩放就行了.
比如某些一米五的女人,拉到一米七
相机模型今天就到这,祝端午安康,我TM还在加班!!!














 178
178











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









