







 文章详细介绍了EnKF(EnsembleKalmanFilter,集合卡尔曼滤波)的基本思想和操作流程,包括初始化、观测步、分析步和预测步。通过一个基于一维谐振子离散模型的简单实战,展示了如何用Python实现EnKF算法,处理带有高斯白噪声的观测数据,并进行状态估计。
文章详细介绍了EnKF(EnsembleKalmanFilter,集合卡尔曼滤波)的基本思想和操作流程,包括初始化、观测步、分析步和预测步。通过一个基于一维谐振子离散模型的简单实战,展示了如何用Python实现EnKF算法,处理带有高斯白噪声的观测数据,并进行状态估计。
EnKF 是一种基于蒙特卡罗方法预测误差统计信息的卡尔曼滤波。它与 PF 的相同点是都采用了采样粒子的集合来表示状态概率空间,但 EnKF 在更新步使用卡尔曼更新,该方法以集合的形式进行模拟预报和 分析更新这两个过程,通过模式状态的集合来表征 误差协方差的信息,以最小化观测值和模拟值的误 差协方差为约束条件,对目标进行最优估计。
了解其基本思路,为便于理解,我们对该过程拆分简化为以下几个流程:
初始化:初始化系统状态变量
 ,初始误差协方差矩阵
,初始误差协方差矩阵  和初始状态预测集合 {
和初始状态预测集合 { }
}
数据同化:时刻
 ,我们分别进行观测步、分析步、预测步,具体流程如下:
,我们分别进行观测步、分析步、预测步,具体流程如下:
a.观测步:
计算观测集合:

计算观测误差协方差矩阵:
b.分析步:
计算卡尔曼增益矩阵:

计算分析集合:

计算分析集合均值:
计算分析误差协方差矩阵:
c.预测步:
计算预测集合:

计算预测集合均值:
计算预测误差协方差矩阵:

对EnKF算法原理了解之后,我们进入一个简单问题的实战(基于python):
考虑离散模型:
显然,这是如下的一维谐振子的数值实现:
这是一个离散的二阶方程,上式中x的系数与 成比例。因此,状态向量有两个输入。
成比例。因此,状态向量有两个输入。
预解矩阵是:
对任意 有
有 ,观测算子为
,观测算子为 ,观测方程为:
,观测方程为:
在高斯白噪声方差为 g 的情况下。这个方差的值应该是已知的。观测结果可能不是在每个时间步骤上都能得到的。
接下来进入代码运行环节:
相关函数定义
# 导入相关库
import numpy as np
import pandas as pd
import seaborn as sn
import warnings
import matplotlib.pyplot as plt
plt.rcParams['font.sans-serif'] = ['KaiTi']
plt.rcParams['axes.unicode_minus'] = False
from scipy.linalg import fractional_matrix_power
np.random.seed(None)
warnings.filterwarnings("ignore")def EnKF(u0_f, P0_f, T, delta, H, X, lam, m): # EnKF函数定义
X_f = [float(u0_f[1][0]), float(u0_f[0][0])]
X_a = [float(u0_f[1][0])]
Y = []
u_f = np.matrix([[X_f[1]], [X_f[0]]])
r = 100 # 生成集合的方差
u1 = mean(float(u0_f[0][0]), r, m)
u2 = mean(float(u0_f[1][0]), r, m)
U_f = []
for i in range(m):
U_f.append(np.matrix([[u1[i]], [u2[i]]]))
for i in range(1, T + 1): # 迭代运算
if i % delta == 0: # 带有观测值时的情况
# 计算增益
r = mean(0, 1, m)
y = X[i] + r
r = np.matrix(r)
u = np.matrix([[X[i]], [X[i - 1]]])
R = float(r * r.T) # 观测误差方差
K = P0_f * H.T * (H * P0_f * H.T + R).I
Y.append(X[i])
U_a = [] # 初始化ua_i
for j in range(m):
U_a.append(U_f[j] + K * (y[j] - H * U_f[j]))
u_a = sum(U_a) / m
X_a.append(float(u_a[0][0]))
# 预测步骤
ind = i // delta
M = matrix(w, lam, X_a[ind])
for j in range(m):
U_f[j] = M * U_a[j]
u_f = sum(U_f) / m
P0_f = 0
for j in range(m):
P0_f += (U_f[j] - u_f) * (U_f[j] - u_f).T
P0_f = P0_f / (m - 1)
else: # 不带有观测值的情况,此时只预测
M = matrix(w, lam, X_f[i])
for j in range(m):
U_f[j] = M * U_f[j]
u_f = sum(U_f) / m
P0_f = 0
for j in range(m):
P0_f += (U_f[j] - u_f) * (U_f[j] - u_f).T
P0_f = P0_f / (m - 1)
X_f.append(float(u_f[0][0]))
return X_f, Ydef mean(j,r,m): #定义固定均值的正态分布
u = np.random.normal(j,r,m)
s = sum(u)/m
return u+(j-1*s)def matrix(w,lam,x): #定义预解矩阵
return np.matrix([[2+(w**2)-(lam**2) * (x**2),-1],[1,0]])问题分析
# 初始化系统状态与误差协方差矩阵
u0_f = np.matrix([[1],[0]])
P0_f = np.array([[0.3, 0], [0, 0.3]])
# 预解矩阵
w = 0.035
lam = 0.0003
H = np.matrix([1,0]) # 观测算子
X = [0,1]
# 时间与时间间隔(步长)
T = 1000
delta = 25
for i in range(2,T+2):
X.append((2+w**2)*X[i-1]-(lam**2)*X[i-1]**3-X[i-2])
m =50 # 定义集合的大小
X_f,Y = EnKF(u0_f,P0_f,T,delta,H,X,lam,m)可视化展示
plt.plot(range(T+2), X, c='Lime', label="实际曲线")
plt.plot(range(T+2), X_f, c="g", linestyle='dashed',label="拟合曲线")
plt.scatter(list(range(delta,T+1,delta)), np.array(Y), c='r', label="观测值")
plt.legend()
plt.title("EnKF")
plt.show()
plt.savefig('EnKF.png')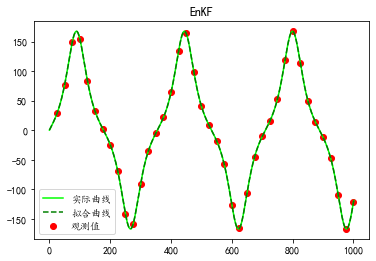
以上即为EnKF算法的原理分析及简单实战,学海无涯,让我们继续一同探索吧!

















 1123
1123

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









