






粒子群轨迹规划,3-5-3多项式时间最优轨迹规划,复现文章代码
ID:52100673692098975
兔er啊

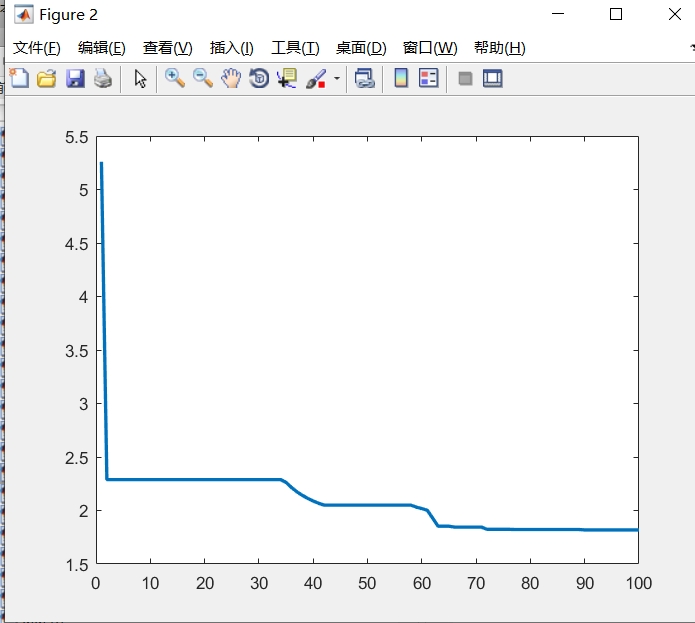
粒子群轨迹规划是一种优化算法,它模拟了鸟群或鱼群的群体行为,通过迭代搜索的方式寻找最优解。在粒子群轨迹规划中,每个粒子代表一个候选解,群体中的每个粒子根据自身的经验和群体的协作,不断更新自己的位置和速度,以搜索更好的解空间。在实际应用中,粒子群轨迹规划已经得到广泛的应用,包括机器人路径规划、无人机航迹规划等领域。
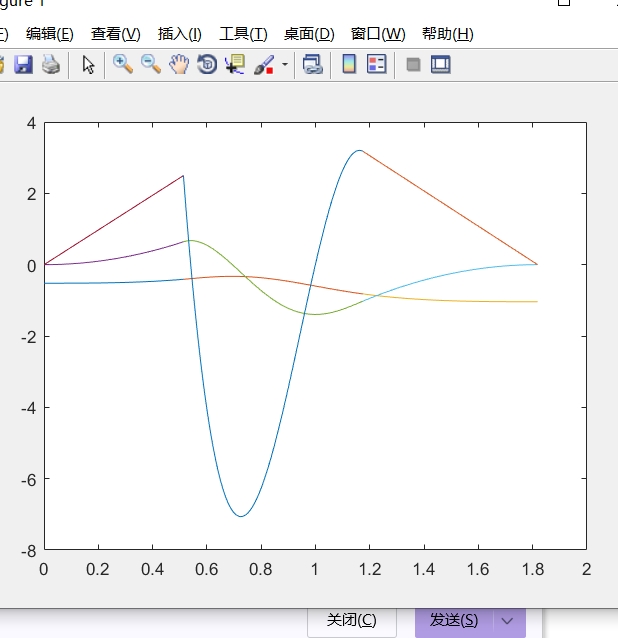
3-5-3多项式时间最优轨迹规划是粒子群轨迹规划的一种改进算法,它通过引入多项式函数来描述轨迹曲线的形状和变化。具体而言,3-5-3多项式轨迹规划使用三个控制点来确定起始位置、目标位置和中间位置,然后利用五次多项式函数来拟合轨迹曲线。这种方法可以更加灵活地控制轨迹的形状,并且能够在给定约束条件下寻找到时间最优的轨迹。
在复现相关文章的代码时,需要注意以下几点。首先,要仔细阅读原文中描述的轨迹规划算法及其相关的参数设置和约束条件。然后,根据原文提供的伪代码或描述,进行代码的编写和实现。在编写过程中,需要注意代码的可读性和可维护性,注释清晰明了,以方便后续的理解和修改。同时,还需要进行合理的测试和验证,以确保代码的正确性和稳定性。
在进行粒子群轨迹规划的实验过程中,可以根据具体的应用场景和需求,调整不同的参数和约束条件,来得到更好的结果。例如,可以调整粒子群的数量、最大迭代次数、惯性权重等参数,以及起始位置、目标位置、中间位置的选择和设置。此外,也可以根据实际情况,引入其他的优化策略和约束条件,如避障约束、动力学约束等,来进一步提升轨迹规划的性能和应用效果。
综上所述,粒子群轨迹规划和3-5-3多项式时间最优轨迹规划是一种有效的路径规划方法,它能够在给定约束条件下,寻找到最优的轨迹解。通过复现相关文章的代码,我们可以更深入地理解和研究粒子群轨迹规划算法的原理和应用,并且可以在实际场景中应用和推广。未来,随着技术的不断进步和应用的广泛推广,粒子群轨迹规划将会在更多的领域发挥重要作用。
相关的代码,程序地址如下:http://wekup.cn/673692098975.html
















 614
614

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









