






matlab机械臂关节空间轨迹规划,3-5-3分段多项式插值法,六自由度机械臂,该算法可运用到仿真建模机械臂上实时运动,可视化轨迹,有角度,速度,加速度仿真曲线。
也可以有单独角度,速度,加速度仿真曲线。
可自行更换程序中机械臂与点的参数。
谢谢大家!(程序中均为弧度制参数)353混合多项式插值
ID:6854712540344617
憧憬未来
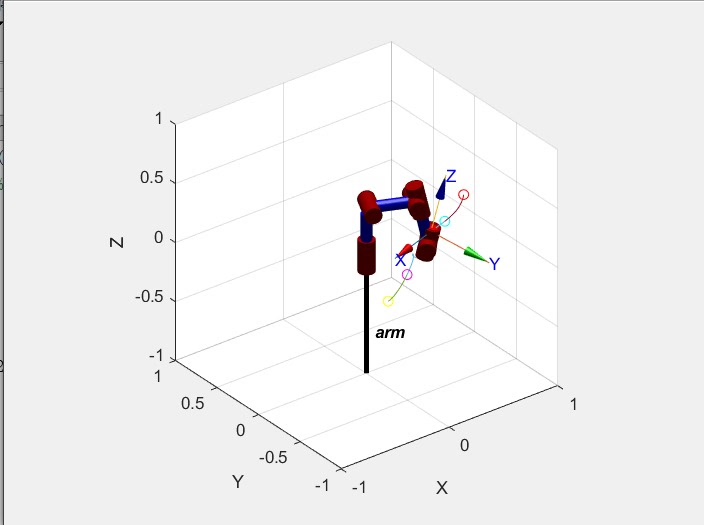
Matlab是一种强大的数值计算和科学计算软件,它在机械臂关节空间轨迹规划方面提供了丰富的功能和工具。本文将介绍一种基于3-5-3分段多项式插值法的机械臂关节空间轨迹规划算法,该算法可应用于六自由度机械臂的实时运动和可视化轨迹显示。
在机械臂运动控制中,关节空间轨迹规划是关键的一步。机械臂通常由多个关节组成,每个关节都有角度、速度和加速度等参数。关节空间即是描述机械臂各个关节状态的空间。机械臂的运动可以通过规划在关节空间中的轨迹来实现。
3-5-3分段多项式插值法是一种常用的关节空间轨迹规划方法。它通过将整个轨迹分为若干段,并在每段中使用多项式插值方法来实现平滑的运动。这种方法能够有效地满足机械臂的运动要求,并且在计算复杂度和精度之间具有很好的平衡。
在本文中,我们将介绍如何使用Matlab来实现3-5-3分段多项式插值法进行机械臂关节空间轨迹规划。首先,我们需要确定机械臂的运动目标和参数。这些参数包括机械臂各个关节的初始位置、目标位置、速度和加速度的限制等。在Matlab中,我们可以使用矩阵表示关节参数,并通过矩阵运算来进行计算。
接下来,我们将介绍如何使用Matlab的插值函数来实现3-5-3分段多项式插值法。在每个插值段内,我们可以使用多项式函数来逼近机械臂的运动曲线。在实际运算中,我们可以通过设置插值点的时间间隔来控制机械臂的运动速度。通过调整插值点的数目和间隔,我们可以在保持运动平滑性的同时实现较高的运动精度。
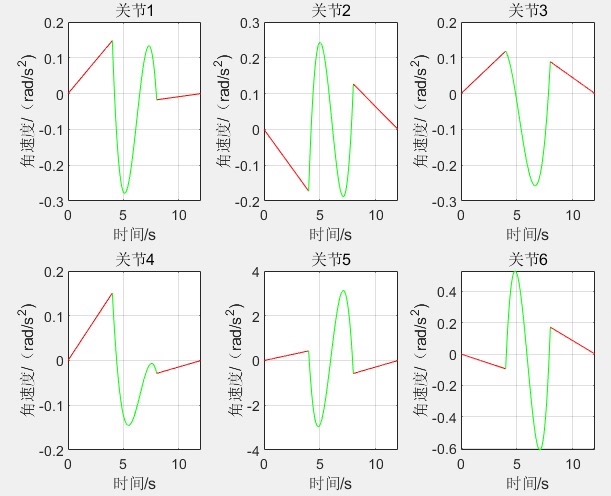
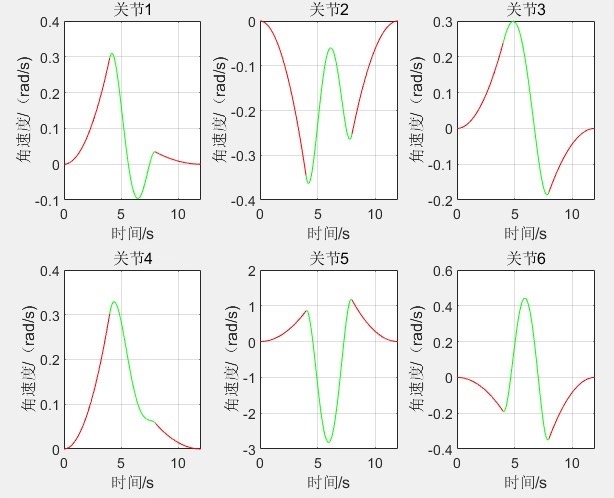
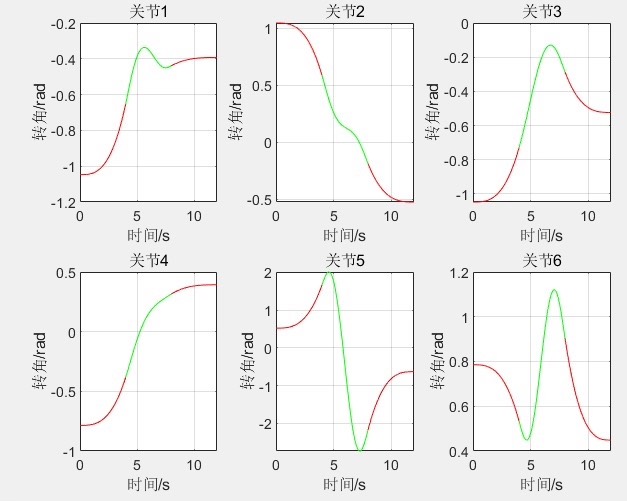
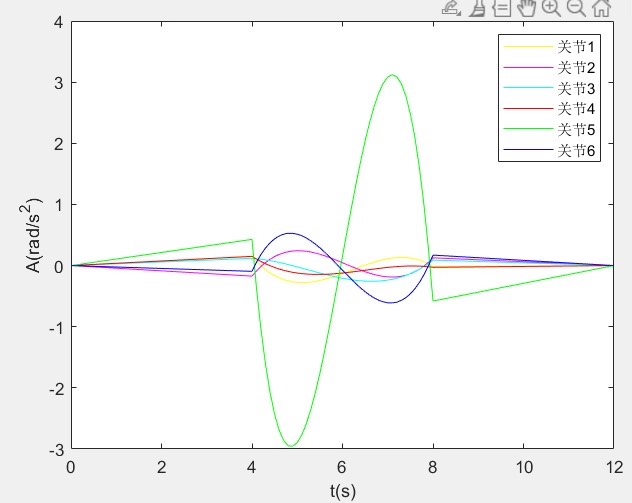
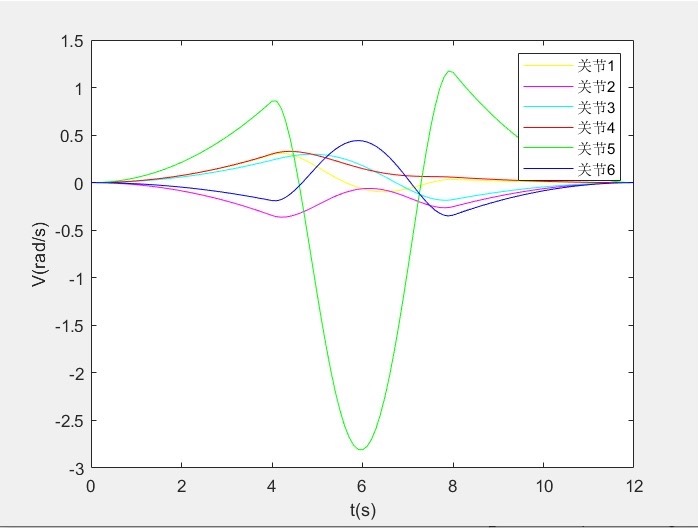
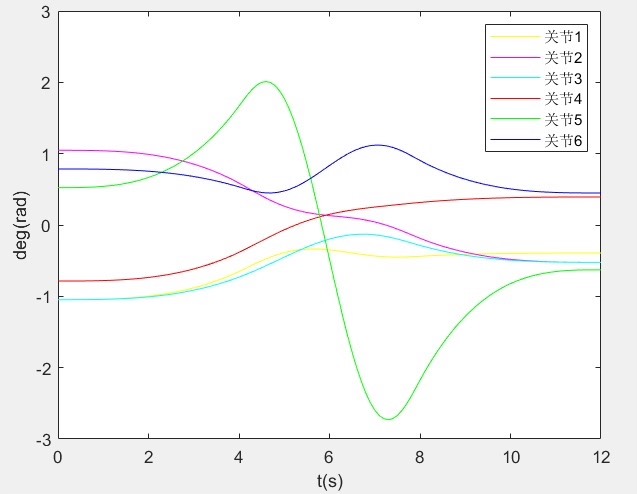
在进行轨迹规划后,我们还可以使用Matlab的可视化工具来显示运动轨迹。通过绘制关节角度、速度和加速度的仿真曲线,我们可以直观地了解机械臂的运动状态。此外,Matlab还提供了交互式工具,可以通过调整关节参数来实时观察机械臂的运动效果。
需要注意的是,本文中的所有参数都是以弧度制表示的。Matlab中的数学函数和计算工具一般默认使用弧度制,因此在进行计算和绘图时需要注意将角度转换为弧度。
最后,我们提供了一个示例程序,以便读者更好地理解和应用本文介绍的算法。读者可以根据自己的需求,更换程序中的机
【相关代码,程序地址】:http://fansik.cn/712540344617.html
















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









