






 本文详细介绍了如何通过粒子群算法对六轴机械臂进行轨迹规划,包括关节收敛曲线和运动曲线的计算,以及MATLAB实现步骤。展示了该方法在精确控制机械臂运动路径中的应用。
本文详细介绍了如何通过粒子群算法对六轴机械臂进行轨迹规划,包括关节收敛曲线和运动曲线的计算,以及MATLAB实现步骤。展示了该方法在精确控制机械臂运动路径中的应用。
六轴机械臂353粒子群轨迹规划代码 复现居鹤华论文 可输出关节收敛曲线 和关节位置 速度 加速度曲线
还有六自由度机械臂混沌映射粒子群5次多项式时间最优轨迹规划 3次多项式 3次b样条 5次b样条 算法可根据需求换成其他智能算法
ID:33180667004301510
余生的梦1121
六轴机械臂的粒子群轨迹规划算法是一种常用的路径规划方法,能够有效地控制机械臂的关节运动,实现精准的轨迹跟踪。本文将对六轴机械臂353粒子群轨迹规划代码进行复现,并详细介绍其原理和实现过程。
首先,我们需要了解六轴机械臂的结构和动力学模型。六轴机械臂的运动由六个自由度的关节控制,每个关节可以独立运动。我们可以通过对每个关节的位置、速度和加速度进行控制,来实现机械臂在三维空间内的运动轨迹。
粒子群算法是一种经典的智能算法,用于优化问题的求解。其基本思想是模拟鸟群或鱼群的行为,通过追随群体中最优个体的位置,来搜索全局最优解。在机械臂的轨迹规划中,粒子群算法可以用来寻找机械臂关节的最优位置、速度和加速度,以使得机械臂能够按照指定的轨迹运动。
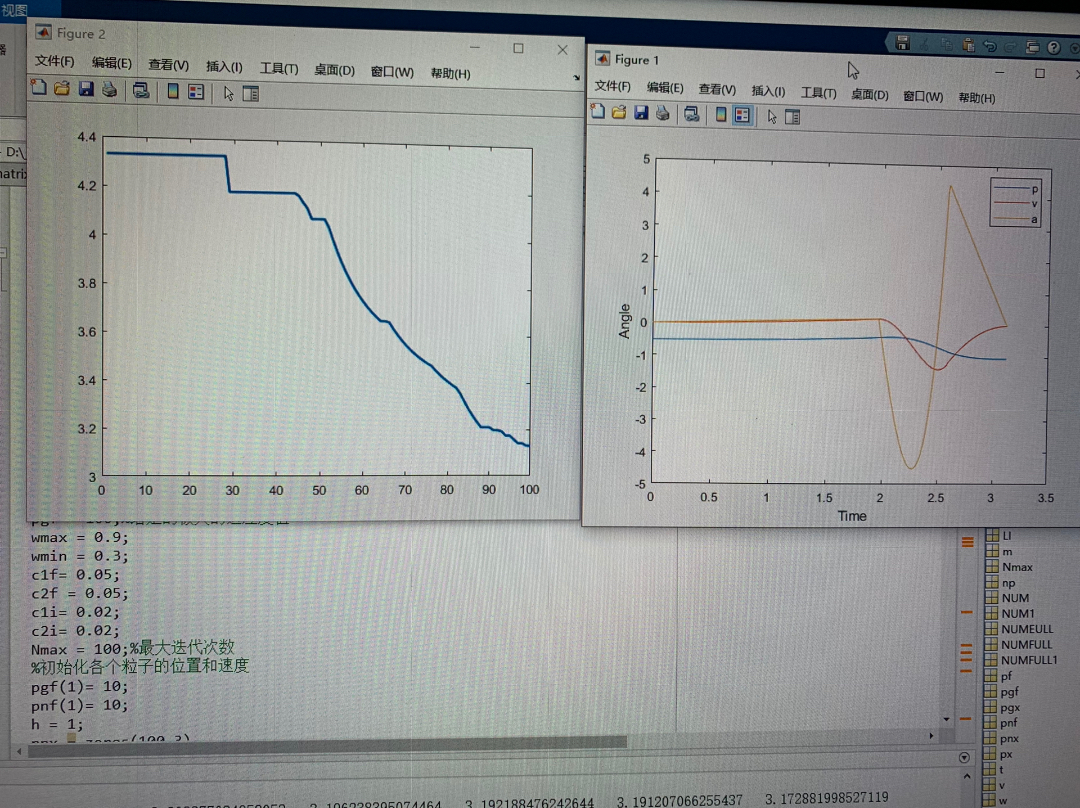
本文复现的六轴机械臂353粒子群轨迹规划代码包括两个主要部分:关节收敛曲线的计算和关节位置、速度、加速度曲线的计算。
关节收敛曲线是指机械臂关节运动到目标位置时的变化曲线。在粒子群算法中,通过不断更新粒子的位置和速度,将粒子引导到最优解的位置。当粒子的位置收敛到目标位置时,关节收敛曲线就得到了。
关节位置、速度和加速度曲线是指机械臂在规划轨迹中的变化曲线。为了使机械臂能够按照规划的轨迹运动,我们需要计算出关节在每个时刻的位置、速度和加速度。通过粒子群算法,我们可以得到最优的关节位置,并根据需要选择不同的算法,如多项式时间最优轨迹规划、b样条等。
在实现过程中,我们可以使用MATLAB等工具来编写代码。首先,我们需要确定机械臂的运动范围和目标位置,然后设置粒子群算法的参数,如粒子数、迭代次数等。接下来,我们可以使用粒子群算法来计算关节的最优位置,并得到关节收敛曲线。最后,根据关节收敛曲线,我们可以计算出关节的位置、速度和加速度曲线。
总结起来,本文在介绍六轴机械臂353粒子群轨迹规划代码的基础上,详细介绍了粒子群算法在机械臂轨迹规划中的应用原理和实现过程。通过复现代码,我们可以得到关节收敛曲线和关节位置、速度、加速度曲线,实现精准的机械臂轨迹跟踪。同时,我们还介绍了其他智能算法的替代选择,以满足不同应用场景的需求。
通过本文的介绍,读者可以了解到六轴机械臂的粒子群轨迹规划方法以及其在实际应用中的意义。希望本文能够对读者在机械臂轨迹规划方面的研究和应用提供一定的参考和借鉴价值。
以上相关代码,程序地址:http://matup.cn/667004301510.html















 439
439

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









