






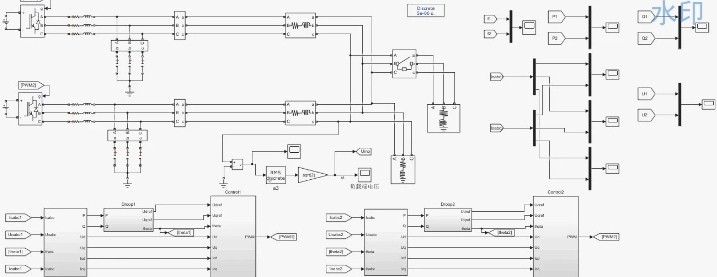
双机并联自适应虚拟阻抗下垂控制(droop)MATLAB仿真模型
标价即原价
下垂控制
电压电流双环控制
锁相环
有参考文献
……
模块完整,运行曲线完美,适合作为基础模型
MATLAB2018b及以上版本。
ID:7117767900258659
December

相关的代码,程序地址如下:http://matup.cn/767900258659.html
双机并联自适应虚拟阻抗下垂控制(droop)MATLAB仿真模型
标价即原价
下垂控制
电压电流双环控制
锁相环
有参考文献
……
模块完整,运行曲线完美,适合作为基础模型
MATLAB2018b及以上版本。
ID:7117767900258659
December
相关的代码,程序地址如下:http://matup.cn/767900258659.html
 1062
1062

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言

























