






手眼标定
手眼标定基本介绍
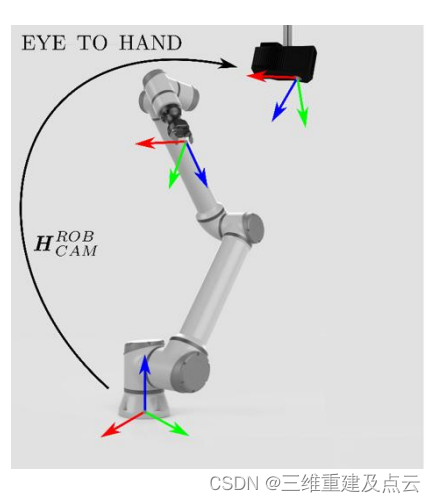
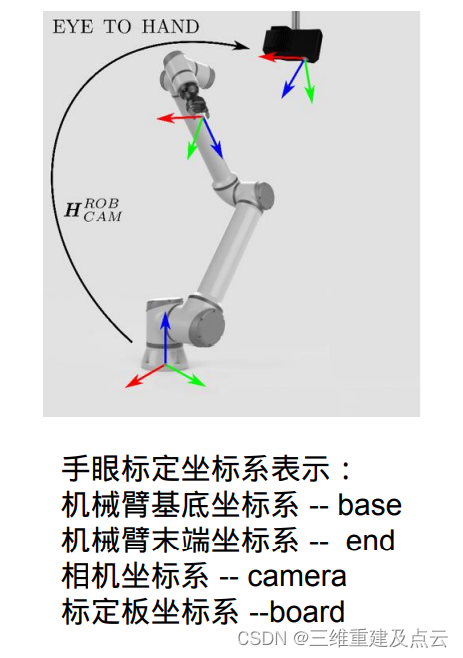
眼在手外:相机固定在机械臂以外的地方,主要标定相机和基底坐标系的转换矩阵
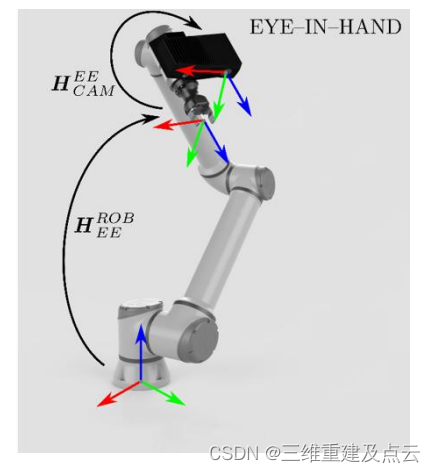
眼在手上:即相机固定在机械臂末端,主要标定相机和机械臂末端的转换矩阵
手眼标定公式推导
坐标系变换运算规则
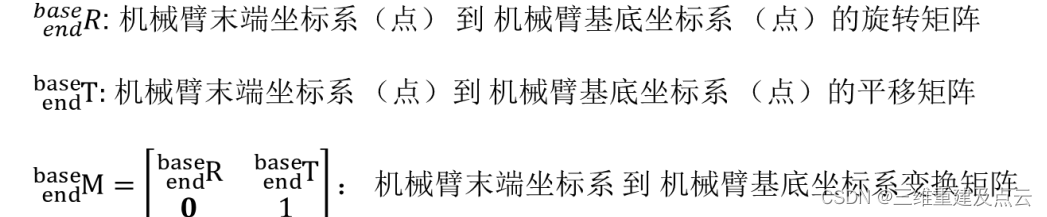
以上等价于:机械臂末端坐标系在基底坐标系下的描述
关系运算说明:
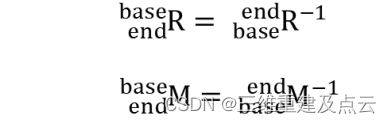
因为R是正交矩阵,正交矩阵的逆=正交矩阵的转置,所以也可以写成转置的形式。
眼在手外推导
求解目标:基底坐标系到相机坐标系的变换矩阵M(base2camera)
**实现方法:**①标定板固定在机械臂末端
· ②相机拍摄不同机械臂姿态下的标定板图片n张,n>3
对每张图片可知:

其中M(board2camera):相机拍摄标定板即可得到(张正友)
M(end2board):未知量。但是犹豫标定板固定在机械臂末端,所以对于每组图像,该转换矩阵都相同(这很重要)
M(base2end):可由机械臂末端位姿参数求得
对上式进行变形:

当我们拍摄多张图像时,根据每张图的M(end2board)相同,构建下式:
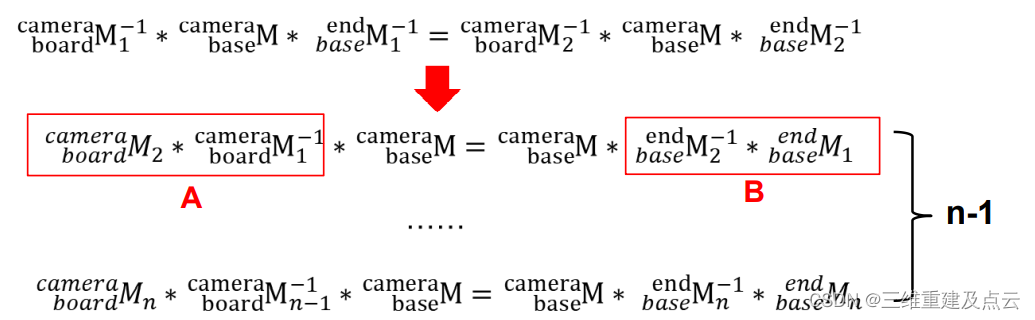
构建成了AX=XB的形式
眼在手上
求解目标:机械臂末端到相机坐标系的变换矩阵M(end2camera)
实现方法: ①标定板固定不动;
②移动机械臂末端,从不同角度拍摄n张标定板;
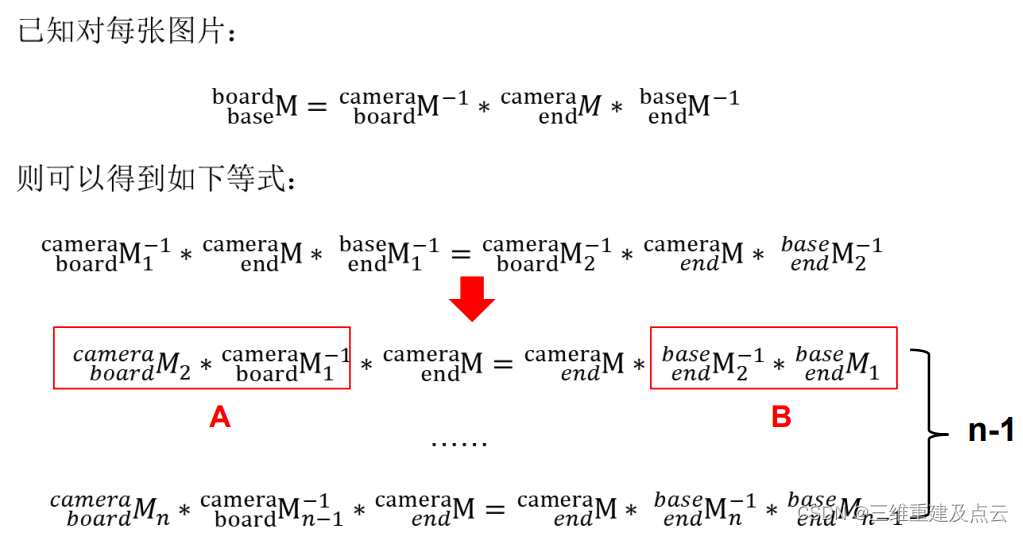
对已知每张图有:

参数命名同上,注意坐标系变换顺序
这里的不变量为:M(base2board) 因为标定板固定不动,所以对每张图这个变换矩阵都相同
方程AX=XB解法讲解
Tais方法
先解算Rx,再求解Tx
对A B X进行形式变换

Tais方法流程(这里只放了大概流程,具体原理可参考资料,opencv已提供相应库函数)
①旋转矩阵变为旋转向量
②旋转向量归一化
③计算修正的罗德里格斯向量
④计算初始旋转向量
⑤计算旋转向量
⑥计算旋转矩阵
⑦计算平移矩阵














 3万+
3万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









