






四轮独立驱动汽车自动轨迹跟踪+横向稳定性控制 CarSim与Simulink联合
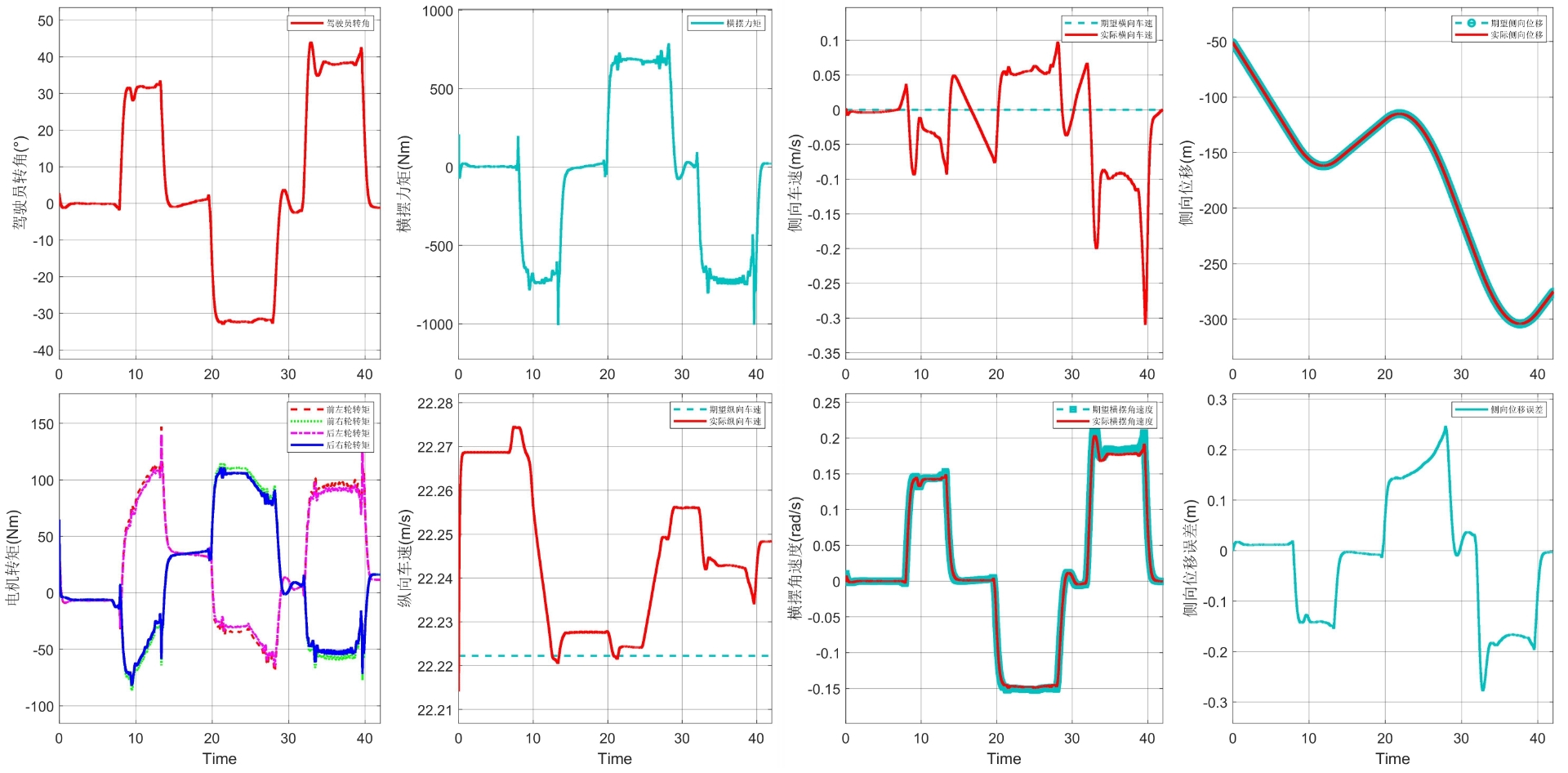
控制目标为对给定轨迹进行跟踪(不带轨迹规划)同时进行横向稳定性控制
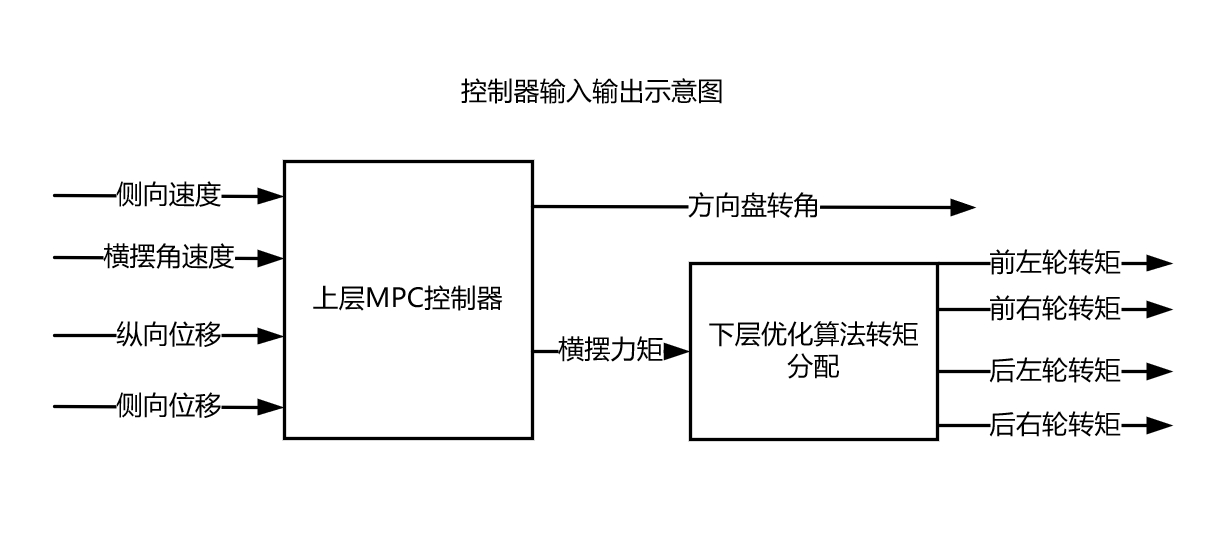
上层控制器为MPC控制器,输出为附加横摆力矩和方向盘转角,采用了二自由度车辆模型
MPC控制器采用代码编写,原理一目了然
将MPC问题转化为了二次规划方法求解
下层为基于优化控制的转矩分配
带有完整详细的推导文档
可通过该模型学习:★MPC控制★将MPC转化为二次规划的方法★轨迹跟踪控制★MATLAB中二次规划和非线性规划的命令使用方法
MATLAB版本为2018b CarSim版本为2018
YID:66109671727271648
让一部分人先把模型搞起来
四轮独立驱动汽车自动轨迹跟踪+横向稳定性控制已经成为汽车行业中的热门研究领域。随着汽车技术的不断发展,越来越多的工程师将目光投向了这一领域,希望通过技术手段来提升汽车的自动驾驶能力和操控稳定性。
在这篇文章中,我们将介绍一种基于CarSim与Simulink联合控制的方法,来实现四轮独立驱动汽车的自动轨迹跟踪和横向稳定性控制。我们的控制目标是对给定轨迹进行跟踪,并同时保持车辆的横向稳定性。
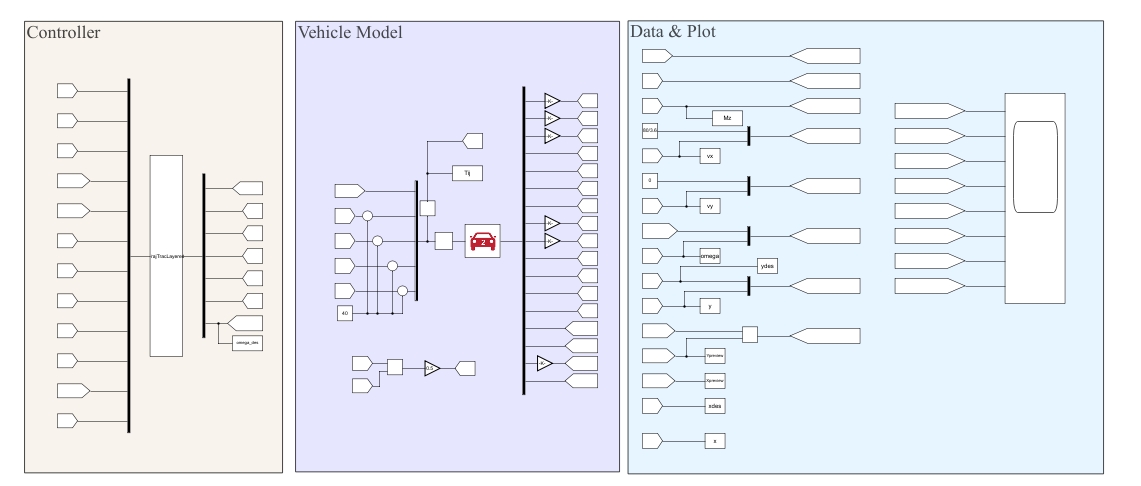
整个控制系统采用了上层控制器和下层控制器的结构。上层控制器采用了基于模型预测控制(Model Predictive Control,MPC)的方法来实现轨迹跟踪和横向稳定性控制。该控制器输出两个控制量:附加横摆力矩和方向盘转角。MPC控制器是通过编写代码来实现的,其原理非常直观和清晰。
为了将MPC问题转化为二次规划方法来求解,我们需要构建一个合适的二自由度车辆模型。通过对车辆运动学和动力学的建模和分析,我们可以得到该模型的状态空间方程和约束条件。然后,我们可以将MPC控制问题转化为求解二次规划问题,从而获得最优的控制策略。
在下层控制器中,我们采用了基于优化控制的转矩分配方法。该方法可以根据车辆的实际状态和控制需要,合理分配转矩给四个独立驱动轮。通过优化控制算法来实现转矩分配,可以使车辆在转弯或者紧急制动等情况下更加稳定和灵活。
我们还提供了完整详细的推导文档,以便读者深入了解我们的控制方法。通过该模型,读者可以学习到MPC控制、将MPC转化为二次规划的方法、轨迹跟踪控制以及MATLAB中二次规划和非线性规划的命令使用方法。我们使用的MATLAB版本是2018b,CarSim版本是2018。
总之,四轮独立驱动汽车自动轨迹跟踪+横向稳定性控制是汽车行业中一个重要的研究方向。通过CarSim与Simulink联合控制的方法,我们可以实现对给定轨迹的自动跟踪和车辆横向稳定性的控制。本文介绍了我们的控制系统结构和原理,以及相关的数学推导和MATLAB命令的使用方法。读者可以通过学习本文,深入理解该控制方法,并在实际工程中应用于汽车自动驾驶系统的开发和优化中。
以上相关代码,程序地址:http://wekup.cn/671727271648.html















 1290
1290











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









