






轨迹跟踪控制算法
模糊+滑膜轨迹跟踪控制算法
模糊+滑膜路径跟踪控制算法
仅供学习入门算法!
推荐使用版本,csrsim8.02,matlab2016b
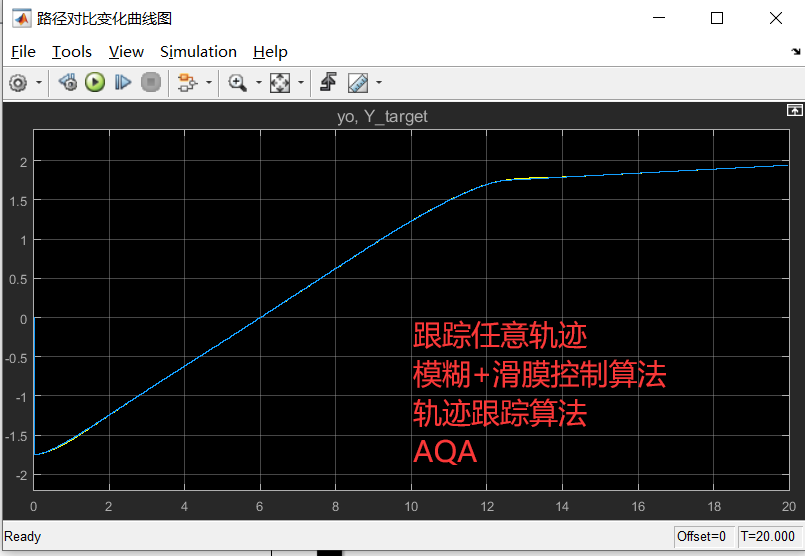
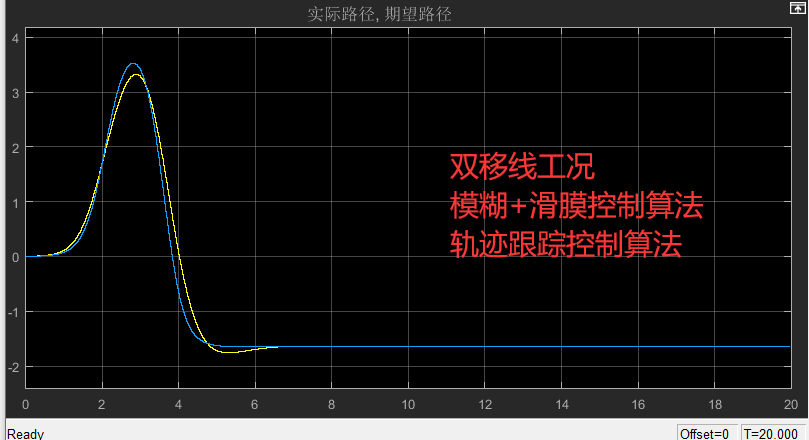
算法可实现功能:跟踪双移线,单移线,多项式曲线等多种轨迹,稳定性和较好
也可以跟踪你想要的轨迹
车辆横向控制算法
ID:9698622786737118
xhusj
车辆横向控制算法是指通过对车辆横向运动进行控制,实现车辆在指定路径上的准确跟踪。其中,轨迹跟踪控制算法是一种常用的横向控制算法。本文将介绍一种基于模糊和滑膜的轨迹跟踪控制算法,该算法能够稳定地实现车辆的轨迹跟踪,并具有较好的性能。
在车辆控制领域,模糊控制和滑膜控制都是常用的控制方法。模糊控制通过将模糊规则映射到控制系统中,实现对非线性系统的控制。而滑膜控制则通过引入滑膜变量,改变系统的动力学特性,从而实现对系统的控制。基于这两种方法,我们提出了一种模糊+滑膜轨迹跟踪控制算法。
首先,我们介绍了算法的使用版本,推荐使用csrsim8.02和matlab2016b。这两个版本具有良好的兼容性,并且拥有丰富的工具箱,能够满足我们进行车辆横向控制算法的实现和仿真需求。
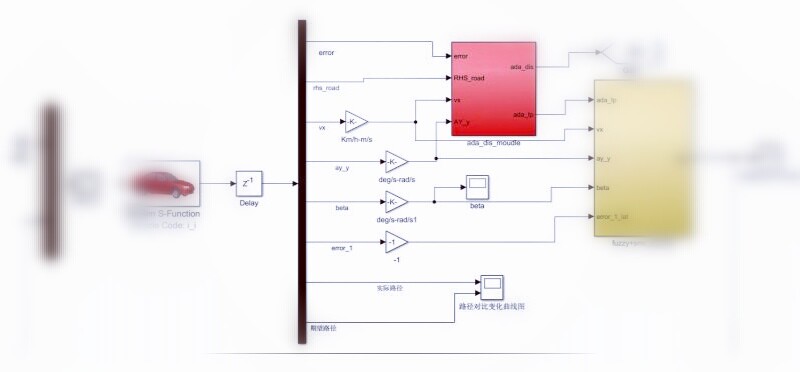
接下来,我们详细介绍了算法的实现原理和步骤。首先,我们需要确定跟踪的轨迹类型,可以是双移线、单移线或多项式曲线等多种轨迹。然后,我们利用模糊控制的方法对系统进行建模,并设计合适的模糊规则。通过模糊规则的映射,我们可以得到模糊控制器的输出。接着,我们引入滑膜变量,并结合滑膜控制方法,构建了滑膜控制器。最后,我们将模糊控制器和滑膜控制器进行融合,得到最终的轨迹跟踪控制器。
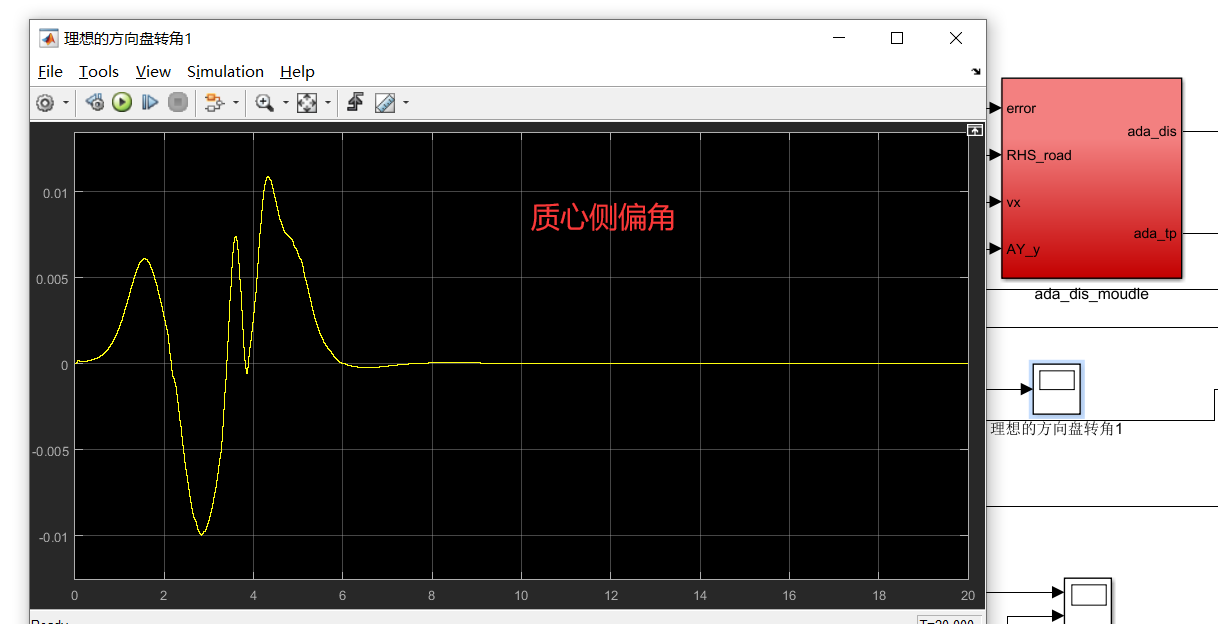
我们对该算法进行了实验验证,并对其稳定性和性能进行了评估。实验结果表明,该算法能够稳定地实现对车辆轨迹的跟踪,并且具有较好的控制性能。此外,该算法还具有一定的灵活性,可以根据用户的需求实现对不同轨迹的跟踪。
总结来说,本文介绍了一种基于模糊和滑膜的轨迹跟踪控制算法,该算法能够稳定地实现对车辆轨迹的跟踪,并具有较好的性能。通过合理地融合模糊控制和滑膜控制方法,我们实现了对横向控制问题的有效解决。此外,我们还推荐了csrsim8.02和matlab2016b作为实现该算法的工具版本,以满足实验和仿真的需求。希望本文对学习入门算法的初学者提供了一些参考,并能够帮助读者在车辆横向控制领域有所突破。
相关代码 程序地址:http://nodep.cn/622786737118.html















 440
440











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









