






轨迹跟踪控制算法
模糊+滑膜轨迹跟踪控制算法
模糊+滑膜路径跟踪控制算法
仅供学习入门算法
推荐使用版本,csrsim8.02,matlab2016b
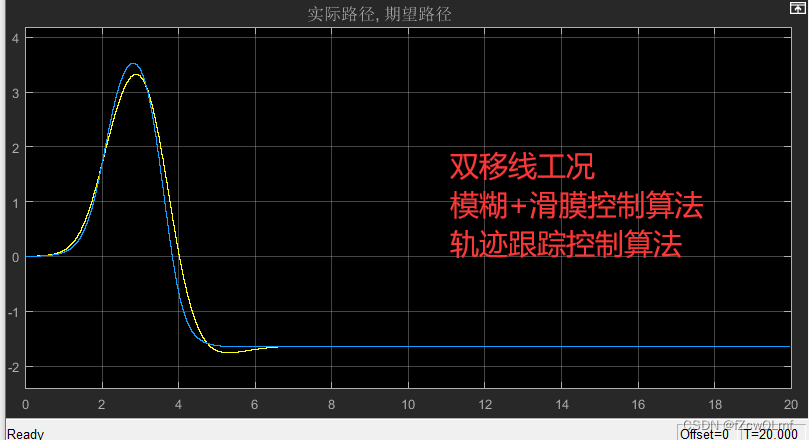
算法可实现功能:跟踪双移线,单移线,多项式曲线等多种轨迹,稳定性和较好
也可以跟踪你想要的轨迹
车辆横向控制算法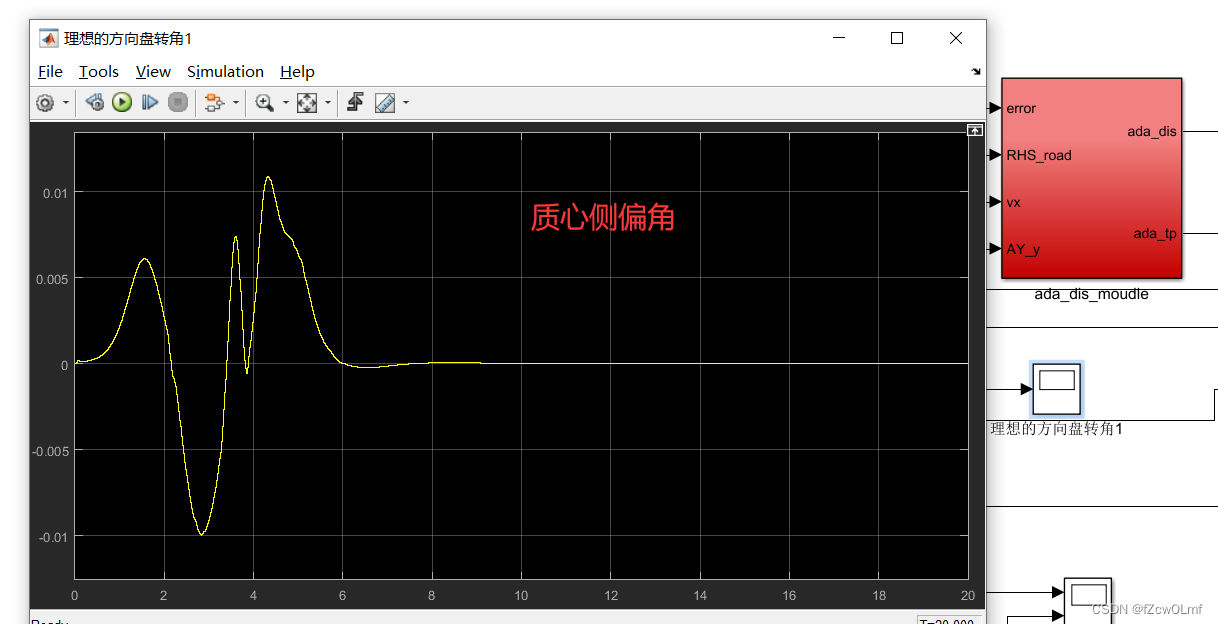

车辆的横向控制算法是指通过控制车辆的横向运动来实现转弯、直行等行驶功能,并能够有效应对车辆在路面行驶中所面临的各种挑战,例如侧风、路面不平等等。
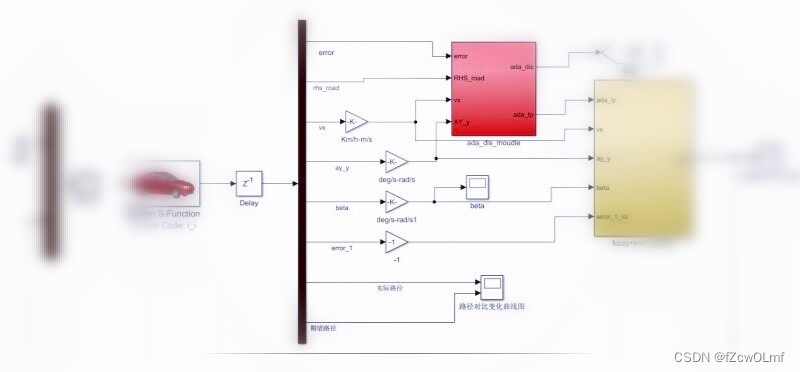
在横向控制算法中,轨迹跟踪控制算法是其中非常重要的一环。模糊+滑膜轨迹跟踪控制算法和模糊+滑膜路径跟踪控制算法是目前应用较为广泛的算法之一。
首先,我们来介绍模糊+滑膜轨迹跟踪控制算法。该算法采用模糊控制器和滑膜控制器相结合,实现对车辆轨迹的跟踪控制。其中模糊控制器能够针对复杂的路况环境进行有效的控制,而滑膜控制器则能够在车辆行驶过程中保持稳定性。该算法还支持多种轨迹的跟踪,稳定性较好。推荐使用版本是csrsim8.02和matlab2016b。
除此之外,模糊+滑膜路径跟踪控制算法也是横向控制算法中的重要算法之一。该算法采用模糊控制器和滑膜控制器相结合,实现对车辆所行驶路径的跟踪控制。与轨迹跟踪控制算法不同的是,该算法能够跟踪复杂的曲线路径,并能够有效避免路径偏离。
需要注意的是,以上两种算法仅供学习入门使用,需要在实际应用中加以优化和改进。
此外,在车辆横向控制算法中,也需要考虑车辆的动力学和控制系统的稳定性等因素。对于车辆横向运动的控制,需要考虑车辆的转向角、侧偏角等因素,并通过车辆转向角速度和侧偏角速度等参数对车辆进行控制。
总的来说,车辆横向控制算法是一个非常重要的领域,涉及到多个学科领域的知识,需要不断对算法进行优化和改进。
相关代码,程序地址:http://lanzouw.top/622786737118.html















 7157
7157











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









