






车辆紧急防避撞AEB控制,模型包含建立驾驶员制动模型来模拟制动过程,同时加入模糊控制实现期望减速度的计算,加入纵向发动机逆动力学模型实时求解期望节气门开度,驱动与制动的切换控制,以及制动压力与减速度之间的关系计算,加入了实际的风阻和滚动阻力的计算,档位的控制,资料包含对应的算法实现原理lunwen,以及节气门开度计算等,非常详细,同时也包含了详细仿真的步骤。
。
绝对节省你大量的时间和精力


车辆紧急防避撞(AEB)控制是一项关键的车辆安全技术,旨在帮助驾驶员避免或减轻碰撞的严重程度。在本文中,我们将介绍一种基于驾驶员制动模型和模糊控制的车辆紧急防避撞控制策略,并对其中涉及的关键步骤进行详细的分析和仿真。
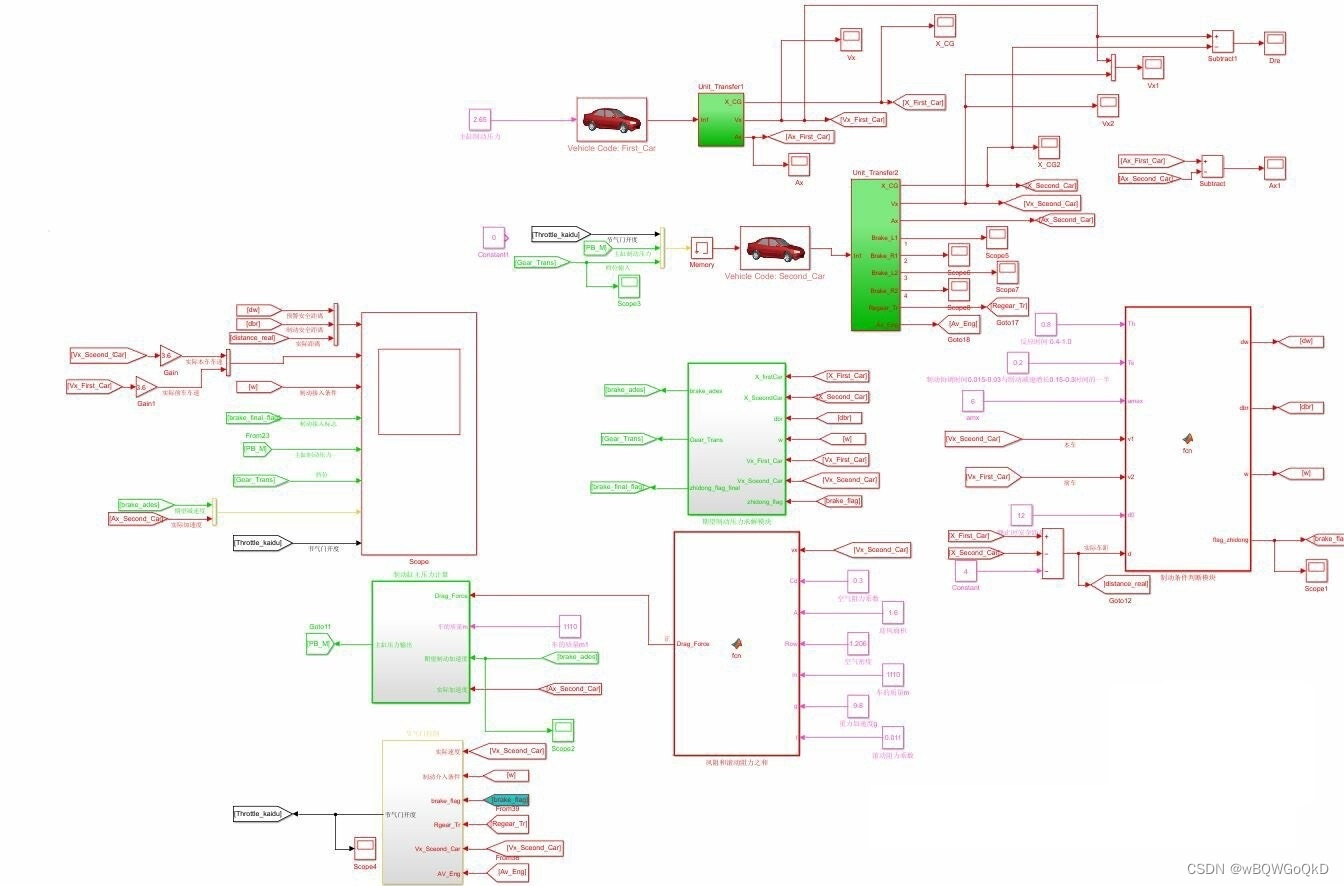
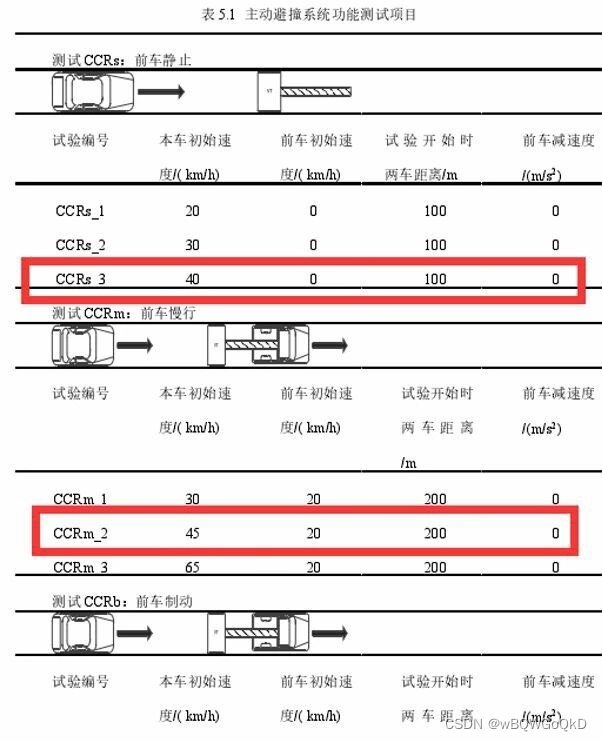
首先,我们需要建立一个能够模拟驾驶员制动过程的模型。该模型将考虑多种因素,如车辆速度、距离以及驾驶员的反应时间等。通过对这些因素的建模,我们可以模拟出最佳的制动策略,以实现最小的碰撞风险。
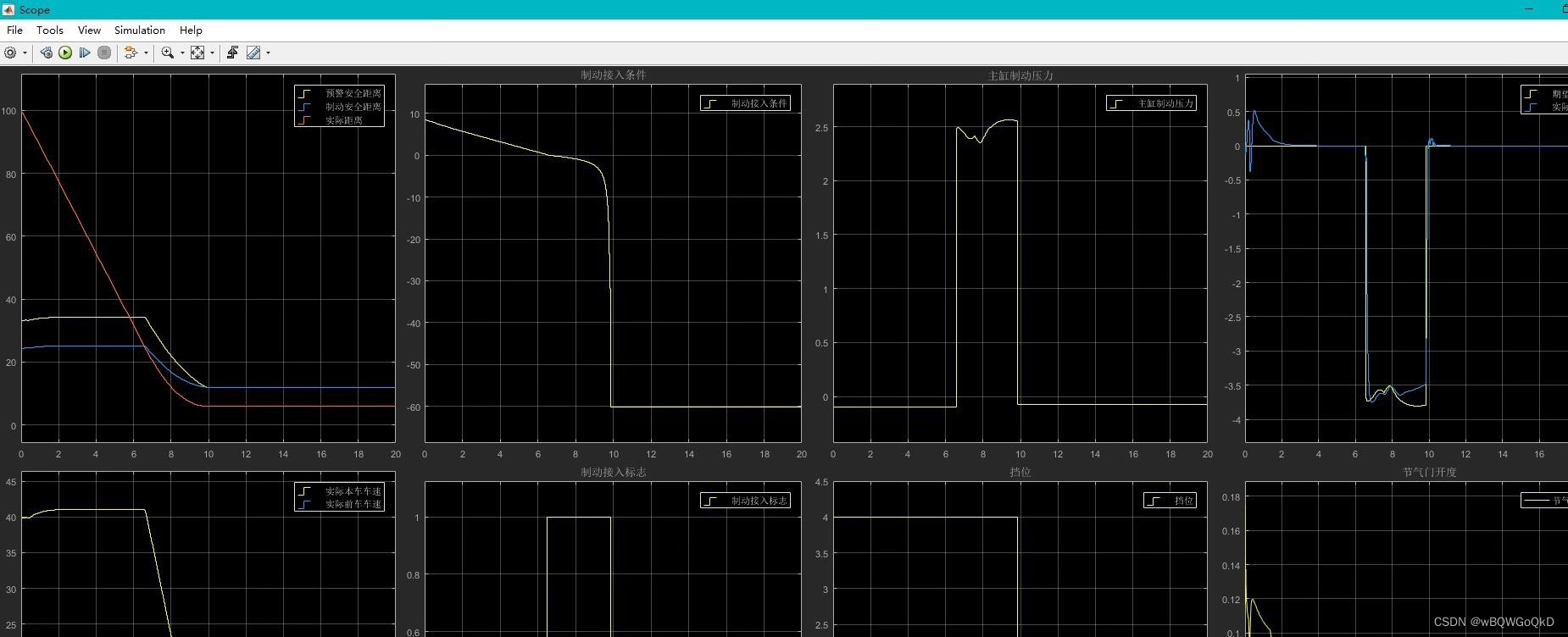
为了计算期望减速度,我们引入了模糊控制技术。模糊控制是一种基于模糊逻辑的控制方法,通过将输入变量和输出变量模糊化,并定义一组模糊规则,来实现对系统的控制。在我们的车辆紧急防避撞控制中,我们使用模糊控制来计算并调整期望减速度,以确保车辆在紧急情况下能够及时停下来或减速。
此外,我们还引入了纵向发动机逆动力学模型来实时求解期望节气门开度。这个模型考虑了发动机的响应特性和动力学特性,通过调整节气门开度,可以实现对车辆加速和减速的控制。
在驱动与制动的切换控制方面,我们需要根据当前的驾驶情况和系统需求来进行决策。当需要加速时,我们将使用适当的驱动控制策略;而当需要减速或停车时,我们将切换到制动控制策略。这种切换控制的目的是确保车辆在紧急情况下能够快速响应,并采取适当的措施来避免碰撞。
此外,我们还需要计算制动压力与减速度之间的关系。制动压力是通过制动系统施加在车辆上的力,而减速度则是车辆的实际减速情况。通过建立二者之间的关系,并进行实时计算,我们可以确保制动压力的控制精准度,从而实现准确的车辆控制。
在模拟和仿真方面,我们提供了详细的算法实现原理和节气门开度计算的资料。通过这些资料,读者可以深入了解我们的控制算法,并在仿真环境中进行验证和测试。在仿真过程中,我们考虑了实际的风阻和滚动阻力,并对档位进行了控制,以更真实地模拟车辆的行驶情况。
综上所述,我们介绍了一种基于驾驶员制动模型和模糊控制的车辆紧急防避撞控制策略。通过细致地分析每个步骤,并提供详细的仿真步骤和资料,我们希望读者可以深入理解这一技术,并在实际的车辆控制中应用它。这一控制策略结合了多个关键技术,是一种高效、准确的车辆紧急防避撞控制方法,有望为提高驾驶安全性和降低碰撞风险做出重要贡献。
通过我们的技术研究和分析,我们相信,这一车辆紧急防避撞控制策略将在未来的汽车行业中得到广泛应用,并为驾驶员和乘客的安全保驾护航。
相关代码,程序地址:http://imgcs.cn/lanzoun/709479358420.html















 1227
1227











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









