






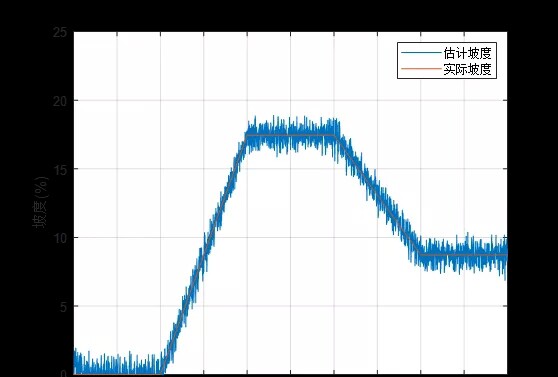
基于simulink的车辆坡度与质量识别模型,扩展卡尔曼滤波,估计曲线与实际误差合理
YID:8572645488015821
是命a
随着汽车行业的发展,车辆动力系统的优化和控制变得越来越重要。在开发新型车辆时,精确的车辆坡度与质量识别模型能够为车辆控制系统提供必要的信息,从而改善车辆性能和驾驶体验。本文将介绍一种基于Simulink的车辆坡度与质量识别模型,并结合扩展卡尔曼滤波算法来估计曲线与实际误差,以实现更准确的车辆控制。
首先,我们需要了解车辆坡度与质量识别的意义。在车辆控制系统中,坡度是指车辆行驶方向的倾斜角度,而质量是指车辆的总重量。准确地估计车辆的坡度和质量对于保证车辆悬挂系统、制动系统以及动力系统的正常运行至关重要。传统方法中通过使用陀螺仪和加速度传感器等装置来获取车辆的坡度和质量信息,但这些方法存在精度不高和成本高昂的问题。
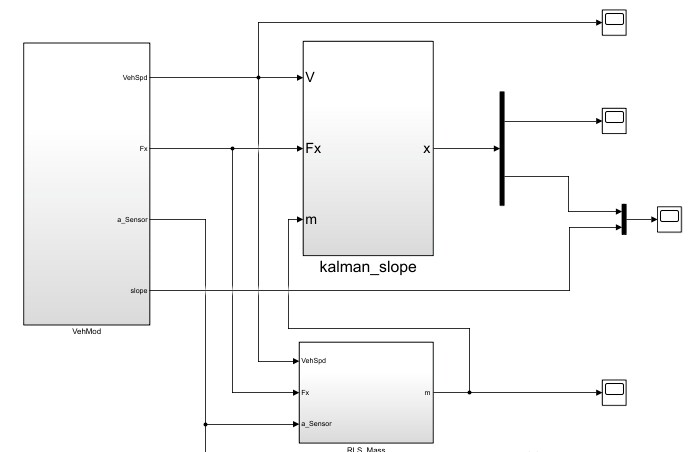
基于Simulink的车辆坡度与质量识别模型是一种创新的解决方案。Simulink是一种功能强大的系统级建模和仿真环境,可以用于开发和测试复杂的动态系统模型。通过使用Simulink,我们可以建立一个包含车辆动力学模型、传感器模型和控制算法的系统模型。该模型可以通过输入车辆的悬挂位移和悬挂力数据,来估计车辆的坡度和质量。
为了提高估计的精度,本文采用了扩展卡尔曼滤波算法。扩展卡尔曼滤波是一种基于卡尔曼滤波算法的扩展,适用于非线性系统的状态估计。在本文的车辆坡度与质量识别模型中,使用扩展卡尔曼滤波算法可以更准确地估计曲线与实际误差。通过迭代更新状态和观测方程,扩展卡尔曼滤波算法可以不断优化估计结果,提高识别的精度和稳定性。
基于Simulink的车辆坡度与质量识别模型结合了系统建模、数据处理和滤波算法等多个技术领域的知识。通过该模型,我们可以准确地估计车辆的坡度和质量,为车辆控制系统提供更准确的输入信号,从而提高车辆的稳定性和操控性能。此外,该模型还可以应用于车辆的自动驾驶系统中,通过识别坡度和质量信息,改善车辆的行驶策略和驾驶安全。
综上所述,基于Simulink的车辆坡度与质量识别模型以及扩展卡尔曼滤波算法可以实现更准确的车辆控制。通过建立系统模型和优化估计算法,我们能够获得更精确的车辆坡度和质量信息,为车辆控制系统提供更可靠的输入信号。未来,我们可以进一步探索和优化该模型,以满足不同车型和驾驶场景的需求,为汽车行业的发展做出更大的贡献。
通过以上的文章,我们能够了解到基于Simulink的车辆坡度与质量识别模型的重要性以及应用价值。该模型能够准确地估计车辆的坡度和质量,为车辆控制系统提供更精确的输入信号。同时,通过扩展卡尔曼滤波算法的应用,可以进一步提高估计的精度和稳定性。该模型的应用前景广阔,可以应用于传统车辆的控制改进,以及自动驾驶系统的开发等领域。我们期待未来能够看到更多基于Simulink的车辆坡度与质量识别模型的研究和应用。
相关的代码,程序地址如下:http://coupd.cn/645488015821.html
















 547
547

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









