









这个好像是骨头什么的,但是要求轮廓闭合,于是对图片进行一下膨胀操作,再次检测轮廓就好了。
// A closed contour.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
// FindRotation-angle.cpp : 定义控制台应用程序的入口点。
//
// findContours.cpp : 定义控制台应用程序的入口点。
//
#include "stdafx.h"
#include <iostream>
#include <vector>
#include <opencv2/opencv.hpp>
#include <opencv2/core/core.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <opencv2/highgui/highgui.hpp>
//#include "highlight"
//#include "highgui.h"
#pragma comment(lib,"opencv_core2410d.lib")
#pragma comment(lib,"opencv_highgui2410d.lib")
#pragma comment(lib,"opencv_imgproc2410d.lib")
#define PI 3.1415926
using namespace std;
using namespace cv;
int main()
{
// Read input binary image
char *image_name = "test.bmp";
cv::Mat image = cv::imread(image_name);
if (!image.data)
return 0;
// 从文件中加载原图
// IplImage *pSrcImage = cvLoadImage(image_name, CV_LOAD_IMAGE_UNCHANGED);
Mat gray(image.size(),CV_8U);
cvtColor(image,gray,CV_BGR2GRAY);
// 转为2值图
threshold(gray,gray,145,255,cv::THRESH_BINARY_INV);
//cvThreshold(pSrcImage,pSrcImage,145,255,cv::THRESH_BINARY_INV);
//image = gray;
cv::namedWindow("Binary Image");
cv::imshow("Binary Image",gray);
cv::Mat element(5,5,CV_8U,cv::Scalar(255));
cv::dilate(gray,gray,element);
//cv::erode(image,image,element);
cv::namedWindow("dilate Image");
cv::imshow("dilate Image",gray);
// Get the contours of the connected components
std::vector<std::vector<cv::Point>> contours;
cv::findContours(gray,
contours, // a vector of contours
CV_RETR_EXTERNAL , // retrieve the external contours
CV_CHAIN_APPROX_NONE); // retrieve all pixels of each contours
// Print contours' length
std::cout << "Contours: " << contours.size() << std::endl;
std::vector<std::vector<cv::Point>>::const_iterator itContours= contours.begin();
for ( ; itContours!=contours.end(); ++itContours)
{
std::cout << "Size: " << itContours->size() << std::endl;
}
// draw black contours on white image
cv::Mat result(image.size(),CV_8U,cv::Scalar(255));
cv::drawContours(result,contours,
-1, // draw all contours
cv::Scalar(0), // in black
2); // with a thickness of 2
cv::namedWindow("Contours");
cv::imshow("Contours",result);
// Eliminate too short or too long contours
/*
int cmin= 100; // minimum contour length
int cmax= 1000; // maximum contour length
std::vector<std::vector<cv::Point>>::const_iterator itc= contours.begin();
while (itc!=contours.end()) {
if (itc->size() < cmin || itc->size() > cmax)
itc= contours.erase(itc);
else
++itc;
}
*/
// draw contours on the original image
cv::Mat original= cv::imread(image_name);
cv::drawContours(original,contours,
-1, // draw all contours
cv::Scalar(255,255,0), // in white
2); // with a thickness of 2
cv::namedWindow("Contours on Animals");
cv::imshow("Contours on Animals",original);
// Let's now draw black contours on white image
result.setTo(cv::Scalar(255));
cv::drawContours(result,contours,
-1, // draw all contours
cv::Scalar(0), // in black
1); // with a thickness of 1
image= cv::imread("binary.bmp",0);
// testing the bounding box
std::vector<std::vector<cv::Point>>::const_iterator itc_rec= contours.begin();
while (itc_rec!=contours.end())
{
cv::Rect r0= cv::boundingRect(cv::Mat(*(itc_rec)));
cv::rectangle(result,r0,cv::Scalar(0),2);
++itc_rec;
}
/*
// testing the enclosing circle
float radius;
cv::Point2f center;
cv::minEnclosingCircle(cv::Mat(contours[1]),center,radius);
cv::circle(result,cv::Point(center),static_cast<int>(radius),cv::Scalar(0),2);
// cv::RotatedRect rrect= cv::fitEllipse(cv::Mat(contours[1]));
// cv::ellipse(result,rrect,cv::Scalar(0),2);
// testing the approximate polygon
std::vector<cv::Point> poly;
cv::approxPolyDP(cv::Mat(contours[2]),poly,5,true);
std::cout << "Polygon size: " << poly.size() << std::endl;
// Iterate over each segment and draw it
std::vector<cv::Point>::const_iterator itp= poly.begin();
while (itp!=(poly.end()-1)) {
cv::line(result,*itp,*(itp+1),cv::Scalar(0),2);
++itp;
}
// last point linked to first point
cv::line(result,*(poly.begin()),*(poly.end()-1),cv::Scalar(20),2);
// testing the convex hull
std::vector<cv::Point> hull;
cv::convexHull(cv::Mat(contours[3]),hull);
// Iterate over each segment and draw it
std::vector<cv::Point>::const_iterator it= hull.begin();
while (it!=(hull.end()-1)) {
cv::line(result,*it,*(it+1),cv::Scalar(0),2);
++it;
}
// last point linked to first point
cv::line(result,*(hull.begin()),*(hull.end()-1),cv::Scalar(20),2);
// testing the moments
// iterate over all contours
itc= contours.begin();
while (itc!=contours.end()) {
// compute all moments
cv::Moments mom= cv::moments(cv::Mat(*itc++));
// draw mass center
cv::circle(result,
// position of mass center converted to integer
cv::Point(mom.m10/mom.m00,mom.m01/mom.m00),
2,cv::Scalar(0),2); // draw black dot
}
*/
cv::namedWindow("Some Shape descriptors");
cv::imshow("Some Shape descriptors",result);
cv::waitKey();
return 0;
}
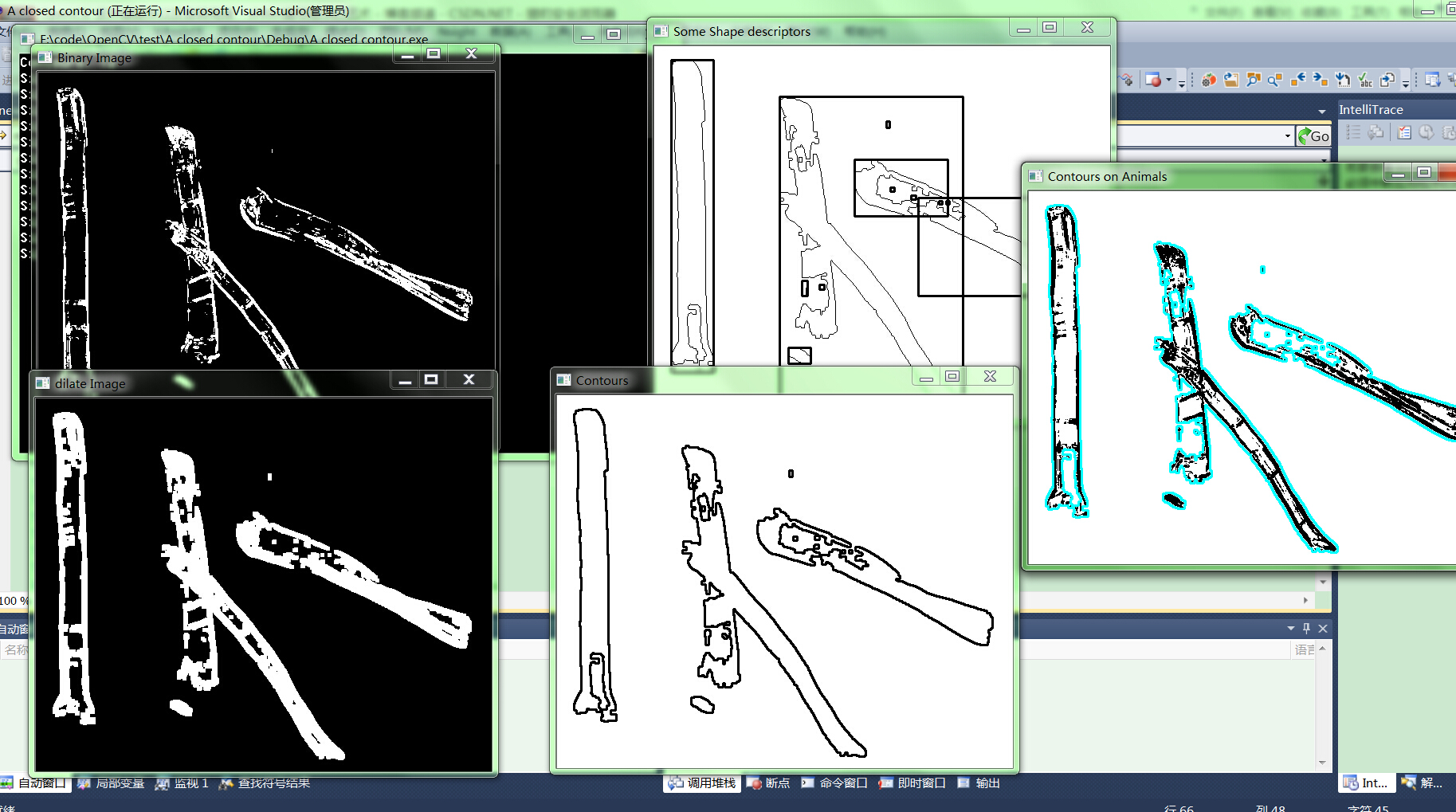
实现效果:















 389
389

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









