



VNDK 是什么
vendor分区native开发需要使用的一系列库
https://source.android.google.cn/docs/core/architecture/vndk?hl=zh-cn#vndk-deprecation-details
为了解耦,system 分区进程不可以加载 vendor 分区中的库,
vendor 分区进程仅加载 vendor 分区中的库和部分 system 分区中的库
framework 和 vendor 之间按照 HIDL/AIDL 方式,通过 IPC/hwbinder 的方式来通信
现在的问题是 framework 和 vendor 的 modules(包括了 so 和 bin),依赖于同一份公共的库,系统升级时一旦这些库的 ABI/API 发生变化,那么framework 和 vendor 都要同步升级。
所以改造的核心就是 framework modules 和 vendor modules 都依赖的那份公共的库。也就是下图中的那个 Dependencies。这些 Dependencies 就是在引入 Treble 设计之前原先 framework 维护的那组 framework modules
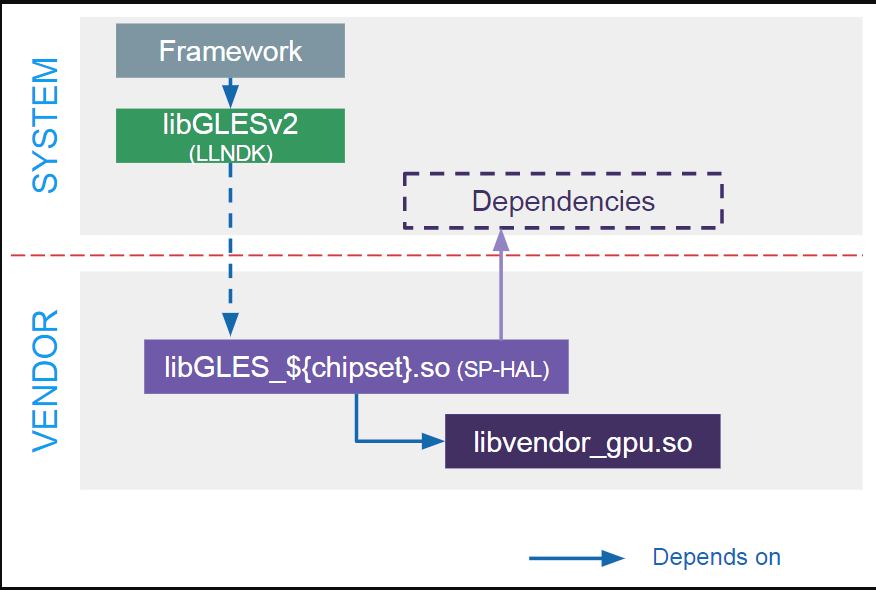
LL-NDK
Low Level NDK,Dependencies 中的一类库 API/ABI 相对稳定的,它们的开发者致力于保持其 API/ABI 稳定性,不会因为 AOSP 的升级而轻易改变 。这都是一些非常底层的基础库,仍然保持一份,framework 和 vendor 共享同一套
libEGL.so、libGLESv1_CM.so、libGLESv2.so、libGLESv3.so、libandroid_net.so、libc.so、libdl.so、liblog.so、libm.so、libnativewindow.so、libneuralnetworks.so、libsync.so、libvndksupport.so 、 libvulkan.so
VNDK | FWK-ONLY
注意 FWK-ONLY 和 VNDK 这两部分还都在system image 中
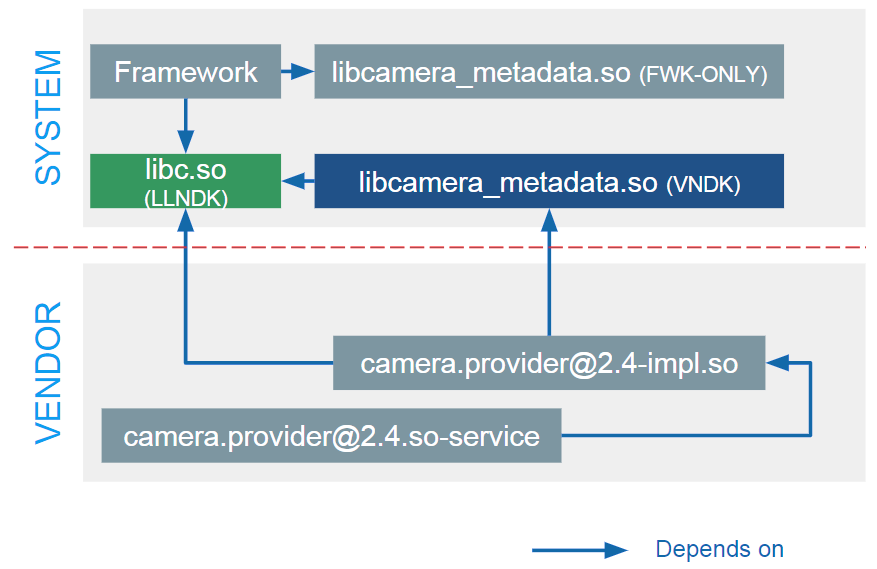
Dependencies 中另一些会被 framework 和 vendor 访问。会将其做成两份。
如下图,libcamera_metadata.so 这个库既会被 Framework 访问,又会被 vendor (图上是 camera.provider@2.4-impl.so)访问。
那么对于这样的库,在编译时会将其做成两份,
一份给 Framework用,即图中的 libcamera_metadata.so (FWK-ONLY) "core variant"
一份给 vendor用,即图中的 libcamera_metadata.so (VNDK) "vendor variant"
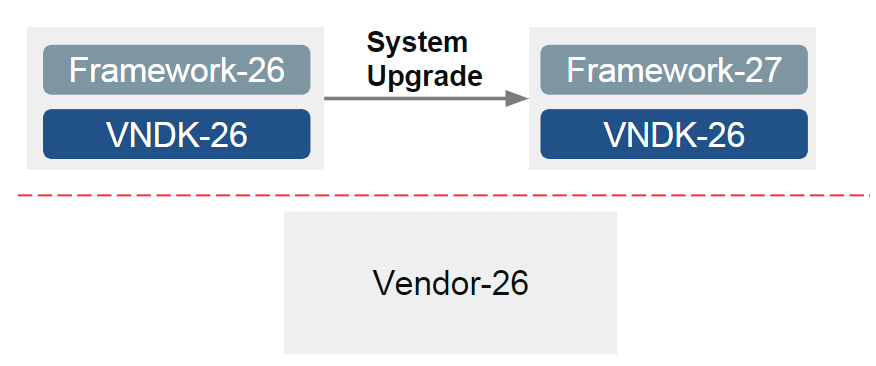
假设需要升级版本,采用的 Framework 和 VNDK 版本都是 26,结合上图
libcamera_metadata.so (FWK-ONLY) 属于 Framework-26 部分
libcamera_metadata.so (VNDK) 属于 VNDK-26,
camera.provider@2.4-impl.so 属于 Vendor-26 部分。那么 vendor module 构建时都是基于 VNDK-26 的,工作正常。
升级系统时,system image升级新的 Framework-27,其中 libcamera_metadata.so (FWK-ONLY) 升级到新的 27,而 VNDK 部分保留 VNDK-26。
这样新系统启动后,Vendor-26 部分的 camera.provider@2.4-impl.so 依然会链接 VNDK-26 版本的libcamera_metadata.so (VNDK),
framework 会链接 27 版本的 libcamera_metadata.so (FWK-ONLY)。
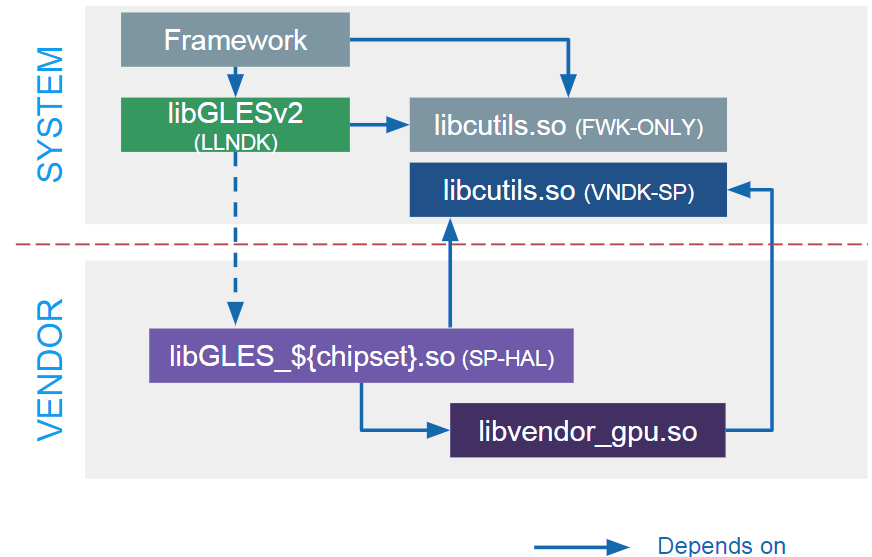
VNDK-SP
VNDK-SP 是服务于SP-HAL的VNDK中的某几个库
如图libGLES_${chipset}.so 是一个 SP-HAL。surfaceflinger 这个system 进程要进行 GPU 合成的时候,需要访问位于 vendor 分区的 GPU 驱动(libvendor_gpu.so),此时需要通过 libGLES_${chipset}.so 这个 HAL 代理,和普通 HAL 通过 IPC 方式不同,SP-HAL 是将 该 so 直接 dlopen 加载到 surfaceflinger 进程。
属于 framework的 surfaceflinger 和 vendor 的 libGLES_${chipset}.so 都要依赖 libcutils.so,同样要遵循 VNDK 的要求,将 libcutils.so 一式两份,其中libcutils.so为 VNDK-SP。
普通 VNDK 中 HAL的service 和 client 之间采用 IPC,所以 libcamera_metadata.so (FWK-ONLY) 和 libcamera_metadata.so (FWK-VNDK) 实际加载在两个不同的进程中,不存在名字冲突的问题。
但是在 VNDK-SP 中 libcutils.so (FWK-ONLY) 和 libcutils.so (VNDK-SP) 两个 so 都会被加载到 surfaceflinger 这个进程中,为了解决加载冲突的问题,Google 又引入了 linker namespace
参考链接
https://www.cnblogs.com/ArsenalfanInECNU/p/17785351.html
https://gitee.com/aosp-riscv/working-group/blob/master/articles/20220923-vndk.md#1-%E5%8F%82%E8%80%83
https://source.android.google.cn/docs/core/architecture/vndk/enabling

















 312
312

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









