







1、医学图像配准
即寻找一种空间变换,使得两幅或多幅图像的对应点达到空间位置和解剖位置的完全一致,配准的结果应该使两幅图像上所有的解剖点、或至少是具有诊断意义的点都达到匹配。
2、医学图像配准的具体步骤
图像预处理–空间变换–图像插值–相似性测度–参数优化–配准效果评价。
图像预处理:目的:使的参考图像和浮动图像的信息和空间分布保持相对一致,即滤除噪声等影响配准效果的一些因素。
空间变换:目的:建立浮动图像和参考图像的空间对应关系。常用的变换方法:刚体变换、仿射变换、投影变换、非线性变换等。
图像插值:计算机中的图像以像素构成,图像中像素位置均采用整数表示,但是经过空间变换之后像素点可能不在是整数,为了能得到存储得计算机中的数字图像,使用插值来获得整数位置上的图像像素值。常用的插值方法包括:最近邻插值、双线性插值、B样条插值等。
相似性测度:定量的衡量两幅图像的匹配效果。配准是在某种相似性测度下取得相对最优。目前经常采用的相似性测度包括:均方根距离、互信息、归一化互信息、相关系数、梯度差、图像差熵等。
参数优化:图像配准实质上是求空间变换参数值使的相似性测度达到最大的过程,本质是配准函数多参数优化问题。常用的配准优化过程有:可直接计算参数的最优化、参数需要通过优化搜索的最优化。
配准效果评价:准确性、可靠性、鲁棒性、计算复杂度。
3、图像配准算法分类
1).根据图像的属性分类:
<1>维数:a.仅考虑空间位数的图像配准。b.考虑空间维数的时间序列图像配准。(每一类中又根据维数进一步划分为:2D/2D(应用于相同或不同断层扫描数据的不同片层之间的配准),2D/3D(应用于空间数据和投影数据之间的配准或是二维片层扫描数据和三维空间数据的配准),3D/3D(应用于两个断层图像的配准).)
<2>模态:a.单模态图像之间的配准(待配准的图像由相同的成像设备获取)。b.多模态图像之间的配准(待配准的图像来源于不同的成像设备)。c.患者和模态之间的配准(应用于放射治疗和计算机辅助手术中的定位)。
<3>主体:a.患者自身的图像配准。b.不同患者之间的图像配准。c.患者与图谱之间的配准。
<4>成像部位:a.头部图像。b.胸部图像。c.腹部图像。
2).根据用户交互性分类:a.交互的。b.半自动的。c.自动的。
3).根据配准所基于的特征本质:a.基于特征的图像配准(需要进行图像的分割来提取图像的特征信息)。b.基于灰度的图像配准(使用图像的统计信息作为配准的相似性度量)。
4.图像配准算法评估
1).准确性:真值和估计值之间的误差。
2).可靠性:一个算法成功的次数。
3).鲁棒性:准确度的稳定性。
4).计算复杂度:决定了算法的速度,显示了算法在实际情况下的实用性。
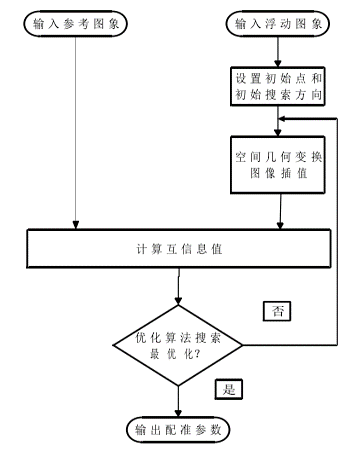
5、基于最大互信息的图像配准方法(流程图)
互信息:a.归一化互信息。b.区域互信息。
几何变换:a.刚性变换。b.投影变幻。c.非线性变换。d.仿射变换。
插值:a.最近邻插值。b.立体卷积插值。 c.双线性插值。d.PV插值。
搜索:a.一维搜索。b.Powell算法。c.粒子群优化算法。
6、基于互信息与边缘梯度的医学图像配准
<1>原理:对于多模图像,不同的成像模式得到的同一器官会有不同的灰度,不同的分辨率,图像尺寸也会有所差别,但是对于同一器官而言,其边界是确定的,不因成像模式的不同而发生很明显的变化,所以同一器官边界上大部分对应像素点的梯度方向是相同或是相反的。因此,两图像像素点梯度的夹角也能反映图像之间的相似性。
<2>配准流程:小波模极大值边缘检测计算梯度相似性系数EG(要求值最大)计算两图像的互信息MI将梯度相似性系数与互信息相乘作为新的配准测度。
EGMI(A,B)=EG(A,B)*MI(A,B)
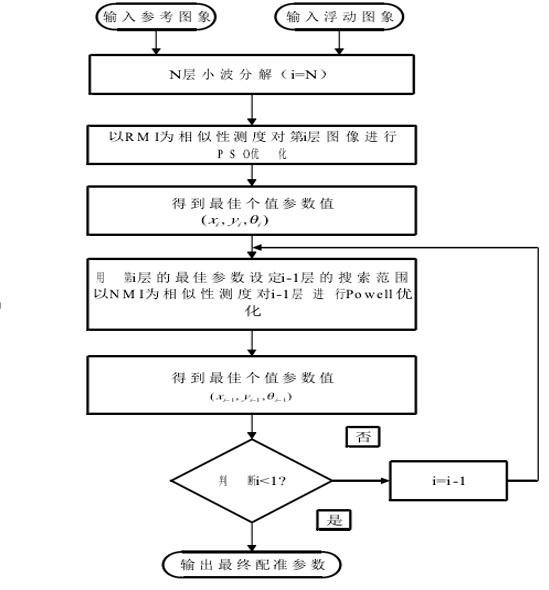
7、基于小波变换与混合优化算法的医学图像配准方法
<1>配准过程:A为参考图像,B为浮动图像。
<1>对图像A,B分别使用二维小波分解算法做N层分解,分别得到图像各层的近似分量–<2>使用PSO算法先配准第N层的近似分量,使用双线程插值,区域互信息RMI作为相似性测度,通过优化算法得到RMI最大时的各项参数,即为第N层配准结果。–<3>第N层的配准参数做为第N-1层Powell算法寻优的初始值。在上层图像进行配准中采用归一化互信息作为相似性测度。插值采用PV插值。–<4>每次都以上层配准结果为基础进行重复迭代配准。得到最终结果。
基于小波变换与混合优化算法的医学图像配准方法(配准流程图)
8、基于物理模型的非刚性医学图像配准算法
<1>配准步骤:利用主轴质心法对两幅待配准图像进行全局粗配准利用改进Harris算子提取全局配准图像和参考图特征点及对特征点进行配准利用Delaunay性质来约束特征点形成三角形网格根据弹性系统中最小势能原理建立偏微分方程对参考图像和配准图像进行相似度测量对配准参数进行优化。
<2>图像预处理:使用中值滤波算法对图像进行去噪。
<3>空间变换:
a.主轴质心全局粗配准算法:通过提取图像的外围轮廓,计算出图像轮廓的质心及主轴,经过旋转和平移变换使两幅图像的质心和主轴对齐,从而实现配准。
b.Harris算子提取图像特征点:首先利用传统的Harris算法计算各个像素的角点量,然后对图像进行分块(固定块数的分块法),对于每块的角点量进行从大到小的排序,取其中间值赋给阈,将每一个矩形图像块中得到的特征点的坐标计算其在原始图像中的列值和行值并保存。
c.特征点匹配(建立两幅图像中特征点之间对应关系),采用的是最小均方误差匹配法(原理:通过求解图像的对应特征点变换方程来计算图像间的变换参数)。
d.生成自适应三角形网格:(原理:利用图像的特征点来约束图像形成不同规则的三角形网格。在形变较大的地方,提取较多的特征点,形成数目众多、形状较小的三角形,形变较小的地方选取较少的特征点形成数目较少、形状较大的三角形。
e.实现图像局部精确配准:构建物理模型——建立图像偏微分方程——求解偏微分方程得到图像的形变量。















 165
165











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









