






 微半球谐振陀螺利用轴对称圆筒旋转时的振动特性,当旋转时振动模式随壳体进动,通过测量进动角度可确定转动角速度。振动由四波幅振动构成,静止时振型固定,旋转时振型与转动角度成比例关系。电容变化被用于检测谐振子的位移,从而实现振动的控制和读出。
微半球谐振陀螺利用轴对称圆筒旋转时的振动特性,当旋转时振动模式随壳体进动,通过测量进动角度可确定转动角速度。振动由四波幅振动构成,静止时振型固定,旋转时振型与转动角度成比例关系。电容变化被用于检测谐振子的位移,从而实现振动的控制和读出。
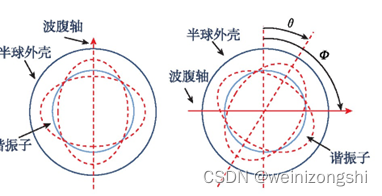
微半球谐振陀螺振动的原理根据是:轴对称圆筒或半球壳绕中心轴旋转时,环向振型不再相对壳体静止而是相对于壳体移动。微半球陀螺的振动是一个四波幅振动,驻波由四个波腹和四个波节组成。当载体静止的时候,波腹和波节的位置保持不变,当载体旋转时,振动驻波发生进动,振型和载体的角速率(或角度)间保持一进动比例k。
这一段话有些抽象,我们可以将上述的“轴对称圆筒”视为一个高脚杯。
如果你去敲击这个高脚杯,它就会振动。如果此时这个高脚杯是静止放置着的,它的振型就永远保持在一个位置。而这个振型,即上述的“四波幅振动”,如上图左所示,当开始振动后,会在某一刻纵方向伸长横方向缩短,而在下一刻又会横方向伸长纵方向缩短,但只要高脚杯静止不动,那么这“横纵方向”是不会改变的,也就是振型是不变的。
当高脚杯旋转起来的时候,振型也会旋转起来改变位置,振动驻波发生进动,且振型和载体的角速率(或角度)间成一个比例关系。
公式:Ψ=kΨ1
式中:Ψ为振型的进动角;Ψ1为壳体转动的角度;k为进动因子。k是与半球谐振壳体的结构常数、振动方式有关的函数,不受外界条件变化的影响。因此,若测量出进动角度Ψ,就可以计算出壳体的转动角度Ψ1,对转动角微分可得壳体的转动角速度ω,从而实现了半球谐振陀螺测量转角和角速度的功能。
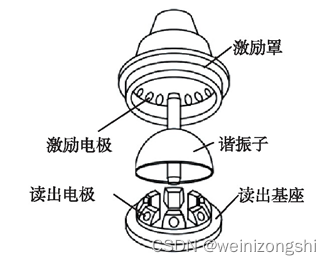
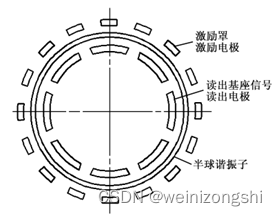
那么如何读出进动角度呢?上图是微半球谐振陀螺的一个简易结构,其中谐振子与激励电极间的电容用于谐振子的驻波振动与控制,谐振子与读出电极间的电容用于检测谐振子的位移。也就是说,激励电极通过电容通与谐振子谐振频率相同的电压(俄罗斯使用方波电压信号驱动,美国使用正弦波电压信号驱动),对谐振子施加静电力产生振动,再通过读出电极上电容的改变检测振型。

















 3316
3316

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









