







声明:此文档版权归属于北京小芽科技,可以转载,但要声明出处(北京小芽科技博客xiaoyatec.com)
硬件配置:
1、USB2Dynamixel串口模块
2、SMPS2Dynamixel电源模块
3、12V5A直流电源
4、Dynamixel舵机
软件配置:
1、roboplus (windows端)
2、cutecom (Ubuntu linux端)
这篇文章主要给大家介绍怎样用linux串口控制robotis 的 Dynamixel舵机。
Dynamixel舵机的通信方式分为两种:TTL和RS485。但这里得注意一点,TTL通信是半双工通信方式,而咱常见的TTL通信,都是全双工的,所以要使用TTL控制舵机,这里就得把全双工的串口转为半双工的通信模式。原理图如下:
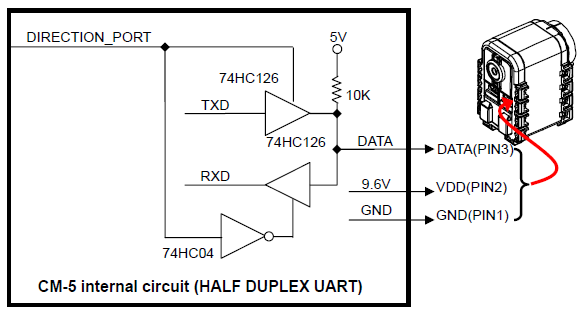
以上原理图是给那些想自己画板子的人看的,一般用户可以直接使用USB2Dynamixel串口模块进行舵机控制。USB2Dynamixel串口模块具有TTL、RS232、RS485通信方式,所以控制robotis所有系列的舵机是完全没问题的。
以下图示是硬件连接部分,USB2Dynamixel串口模块具有三个档位,代表三种不同的通信方式,现在把它移至TTL档位:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 4787
4787











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









