








一、工作原理
超声波雷达通过发射装置向外发出超声波,到通过接收器接收到反射过来的超声波时的时间差来测算距离。
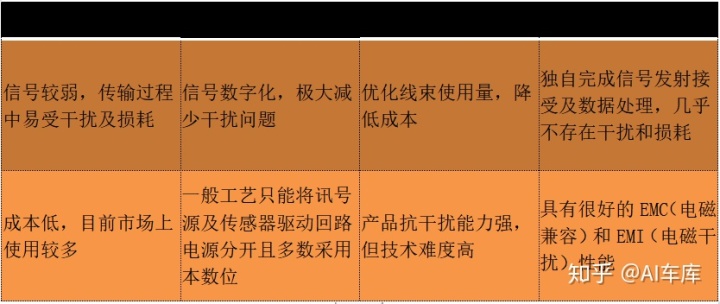
超声波雷达的技术方案,一般有模拟式、四线式数位、二线式数位、三线式主动数位等4种,4种方案在信号干扰的处理效果上依次提升,在技术难度、装配以及价格上各有优劣。
目前市场上使用较多的是“模拟式”技术路线,其优点为成本低,但易受外界环境干扰。“数位式”技术路线的信号数字化,可以大幅提高雷达的抗干扰能力,但成本较高,技术难度大,现阶段的工艺水平只能多数采取四线式做法。
二、应用和市场
超声波雷达探测距离短,探测范围在0.1-8米之间,精度较高、分辨率高、方向性好、成本低,因此非常适合应用于泊车,其它基础应用包括盲区碰撞预警、前向碰撞预警等。但超声波雷达测量距离有限,且很容易受到恶劣天气的影响。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 3672
3672











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









