







 2D凸多边形碰撞检测算法(二) - EPA原理有了 GJK 算法的基础,我们很容易就能掌握 EPA 。EPA ,全称 Expanding Polytope Algorithm 。它与 GJK 同样使用闵可夫斯基和,单纯形这两个基础概念与 support 函数,来获得物体的 穿透向量 (Penetration Vector)。同样的,它也是一个迭代算法,且只适用于凸多边形。不过,与 SAT 不同的是...
2D凸多边形碰撞检测算法(二) - EPA原理有了 GJK 算法的基础,我们很容易就能掌握 EPA 。EPA ,全称 Expanding Polytope Algorithm 。它与 GJK 同样使用闵可夫斯基和,单纯形这两个基础概念与 support 函数,来获得物体的 穿透向量 (Penetration Vector)。同样的,它也是一个迭代算法,且只适用于凸多边形。不过,与 SAT 不同的是...
2D凸多边形碰撞检测算法(二) - EPA
原理
有了 GJK 算法的基础,我们很容易就能掌握 EPA 。EPA ,全称 Expanding Polytope Algorithm 。它与 GJK 同样使用闵可夫斯基和,单纯形这两个基础概念与 support 函数,来获得物体的 穿透向量 (Penetration Vector)。
同样的,它也是一个迭代算法,且只适用于凸多边形。不过,与 SAT 不同的是,GJK + EPA 可以通过定制不同的 support 函数,轻松实现 椭圆 之间或 封闭凸曲线 构成的图形之间的碰撞计算,从而泛化物体碰撞。
下面,我们先从多边形入手,来分析 EPA 算法到底是如何工作的。
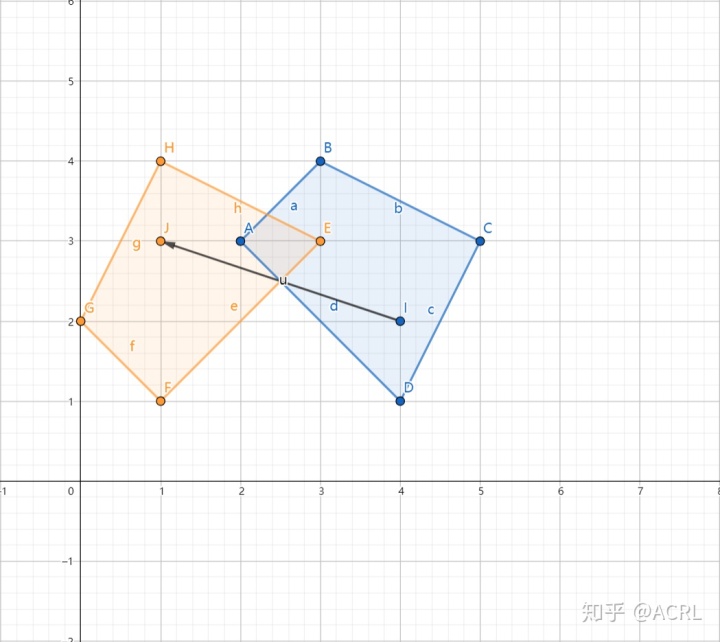
按照惯例,创建两个碰撞的多边形, I 与 J 分别是蓝色多边形与黄色多边形的位置坐标。
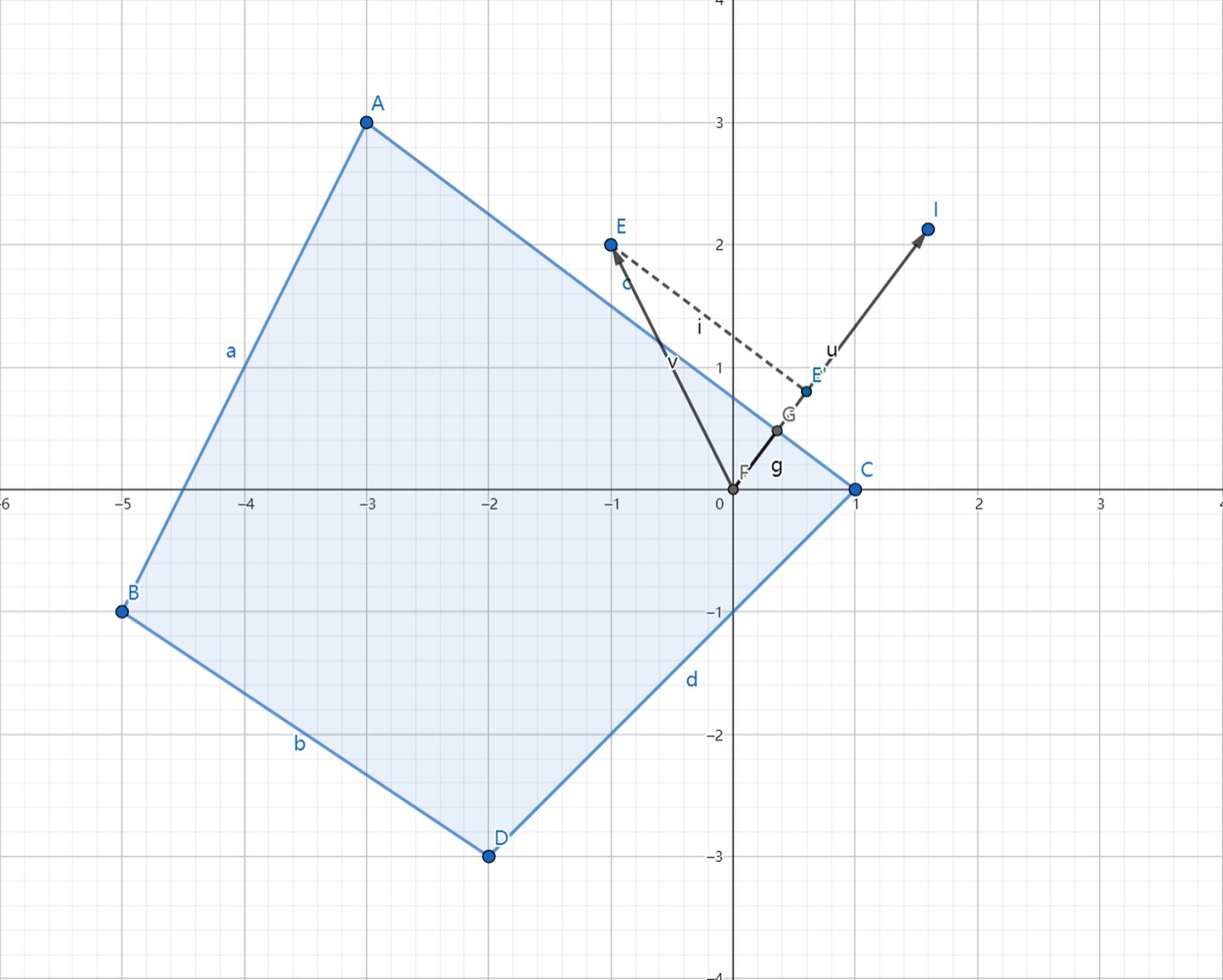
我们先算出它们包含原点的单纯形:
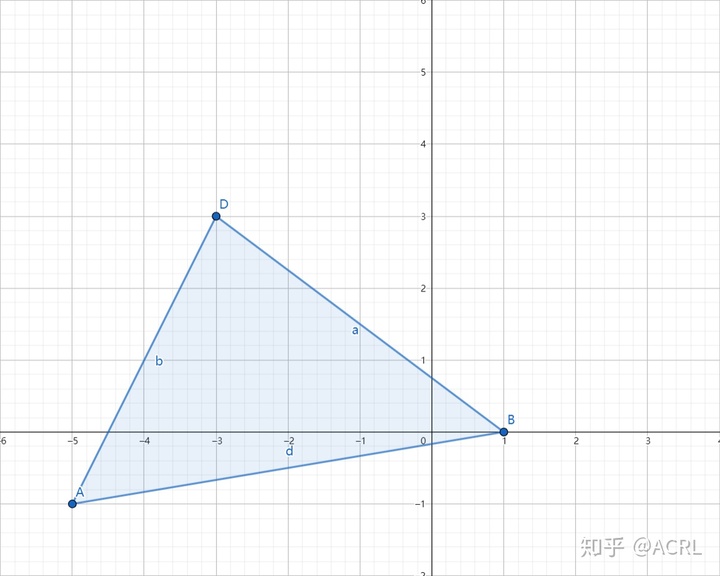
我们通过 GJK 获得的这个单纯形,将作为我们进行 EPA 迭代的一个较好的起点。
首先, EPA 的核心目的是 拓展单纯形 。在 EPA 迭代中,单纯形不仅仅是一个三角形,它可以是一个凸多边形。EPA 扩展成多边形以及计算穿透深度的思路是:
- 获得与原点距离最短的边,记录距离为
背离原点 的向量。
。求出与这条边垂直、且
- 将计算得到的闵可夫斯基差,投影到这一个向量上,计算它与原点的距离
- 计算表达式:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1900
1900











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









