






离群点最早是数据挖掘领域的概念。数据挖掘中的分类、聚类方法主要用于发现数据分布的典型聚簇特性,而往往将样本空间中偏离典型模式的小类或者离群点视为噪声加以剔除。常用的离群点检测方法可以大致分为统计学方法、基于距离的方法和基于偏离的方法等。但是离群点剔除算法也存在其缺陷之处,对离群点直接剔除会导致一部分的信息丢失。本文主要介绍的离群点修正算法,是在传统的离群点剔除算法的基础上进行一定程度的优化,更好的在调频连续波激光雷达回波信号的滤波中进行应用。
将激光雷达回波信号转化为对应的速度信号和距离信号,但此时信号中有很多噪声。针对运动速度波形,由于对于现实车载场景,运动速度无法阶跃性突变,存在突变的点周围其他点较少,我们将其标记为离群点。这种思想与离群点剔除算法有共通之处,所以我们将离群点剔除算法移植在调频连续波激光雷达速度滤波之中。
离群点剔除算法将离群点看成没有“足够多”临近的同类型点的目标点位,这里的临近同类型点是基于与目标点位间的距离来定义的。首先,在速度—时间二维散点图上,建立循环求取每一个点到其它所有临近点的距离,插入集合。数据集合分布的形状由数据的均值和方差决定,据此可以确定邻域半径r和离群点数门限值p。当一个点以半径为r的邻域周围点数小于离群点门限值p时,那么该点可以被定义为离群点;当一个点以半径为r的邻域周围点数大于等于离群点门限值p时,那么该点可以被定义为正常点。该方法的优点在于与不一致性检验相比,可以极大地降低系统运算量。

为验证调频连续波激光雷达强度门限滤波和离群点修正算法的有效性和优越性,做出如下数据处理验证过程。
使用静态激光雷达扫描前方视场,视场中包括动态目标和静态背景。

如上图所示,原始速度信息中包括目标速度、静态背景和噪声点信息。经过初始门限滤波,速度信息如下图所示。
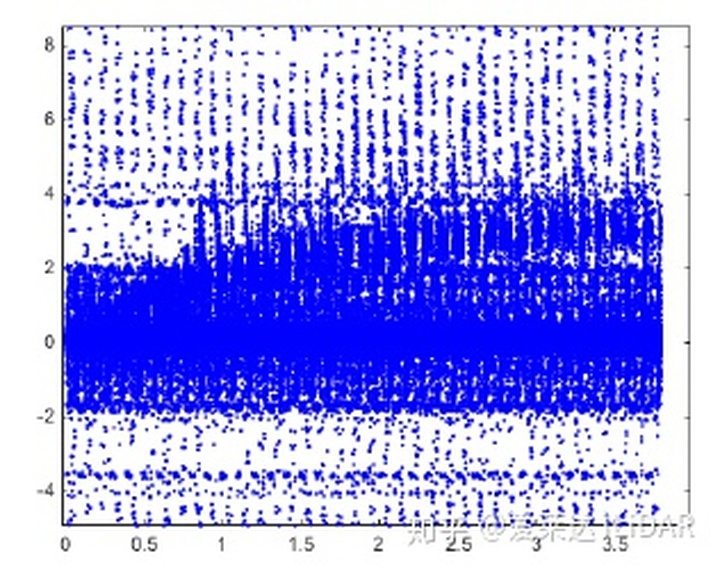
可以看出,门限滤波方法可以滤除部分噪声信号,但依然存在大量强度较高的噪声信号无法滤除。
然后分别对该速度信息继续使用离群点剔除算法和离群点修正算法进行滤波。得到的速度信息如下图所示。
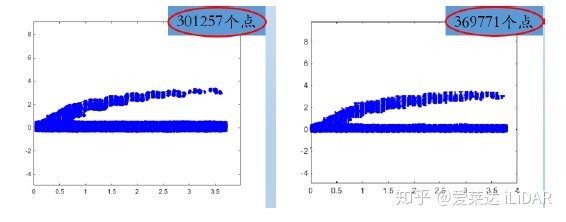
经对比,离群点剔除算法和离群点修正算法都可以滤除大量噪声,但离群点修正算法可以在滤波的同时对坏点进行有效修正,保留更多的有效信息。
在离群点剔除算法的基础上,将判定为离群的点前一时刻的速度值赋值给的离群点所在的索引位上,相较于传统的离群点剔除算法,这样的滤波算法可以在不降低样本数量的同时,对坏点进行有效修正。但对于距离信号和上升沿下降沿信号,由于扫描成像体制,会出现阶跃变化,无法使用本文所述的离群点修正算法。而对于无阶跃变化的FMCW激光雷达速度时域信号,尤其适用本文提出的离群点修正算法进行速度滤波。















 3503
3503











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









