







激光点云定位一般预先制作定位地图,不管是 3D 还是 2D 地图。然后用车上的实时点云和地图进行匹配,来计算激光雷达的位置和姿态,再通过激光雷达与 IMU 之间的外参,得到 IMU 的位置和姿态。匹配有很多种方法,可以是基于 3D 点云匹配的 ICP 方法,也可以是我们这里给出的基于 2D 概率地图的直方图滤波器匹配定位。
激光定位的优点是在没有 GPS 情况下可以工作,鲁棒性比较好;缺点就是需要预先制作地图,同时要定期更新地图(因为环境会发生变化),雨雪天气也会受到影响(因为 Lidar 被折射的比较多,收到的点云数据变少)。
激光 SLAM 脱胎于早期的基于测距的定位方法(如超声和红外单点测距)。激光雷达的出现和普及使得测量更快更准、信息更丰富。激光雷达采集到的物体信息呈现出一系列分散的、具有准确角度和距离信息的点,被称为点云。通常激光 SLAM 系统通过对不同时刻两片点云的匹配与比对,计算激光雷达相对运动的距离和姿态的改变,也就完成了对机器人 / 自动驾驶车辆自身的定位。
激光雷达距离测量比较准确,误差模型简单,在强光直射以外的环境中运行稳定,点云的处理也比较容易。同时点云信息本身包含直接的几何关系,使得机器人的路径规划和导航变得直观。激光 SLAM 理论研究也相对成熟,落地产品更丰富。
激光 SLAM 框架一般分为前端扫描匹配、后端优化、闭环检测、地图构建四个关键模块。下面从算法的角度分别对四个模块进行总结:
- 前端扫描匹配是激光 SLAM 的核心步骤,已知前一帧位置并利用相邻帧之间的关系估计当前帧的位置。前端扫描匹配能给出短时间内的位置和地图,但难免有不可避免的误差累积。
- 后端优化正是当长时间增量式扫描匹配后优化里程计及地图信息。目前在激光 SLAM 中主流的扫描匹配算法包括:迭代最临近点及变种、相关性扫描匹配、基于优化方法、正态分布变换、基于特征的匹配以及其它匹配算法。
- 闭环检测负责通过检测闭环而减少全局地图的漂移现象,以便生成全局一致性地图。
- 地图构建模块负责生成和维护全局地图。
在 3D 激光 SLAM 中,最流行的匹配方法是基于特征的匹配,典型的开源方案是 LOAM。
激光 SLAM 的基本原理就是点云拼接,也就是上文中提到的配准。可以利用柱状物等特征信息来拼接,也可以直接用点来拼接,总之这方面各种方法大同小异、区别不大。激光 SLAM 的开源项目也有很多,LOAM/LeGO-LOAM 就是其中经典的方案。
在 3D 激光 SLAM 领域中,由 Zhang J 等人提出的 LOAM 方案,利用 3D 激光雷达采集数据,进行基于特征点的扫描匹配,利用非线性优化方法进行运动估计,激光里程计的输出与地图进行匹配,包括直线匹配和平面匹配,无回环检测模块,点面特征还不够可靠。LOAM 方案的框架如图所示。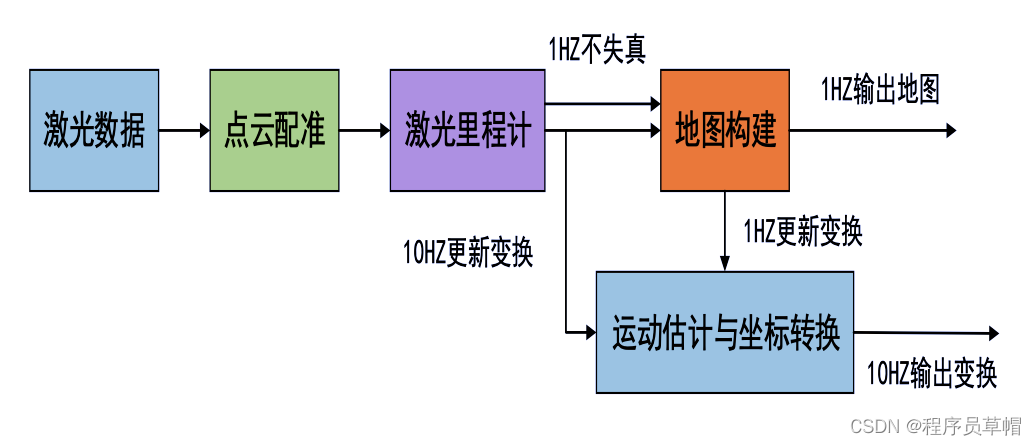


















 767
767

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









