






 本文档详细介绍了如何配置KUKA机器人的外部轴,包括创建样本文件、设置电机参数、耦合外部运动系统与机器人系统,以及定义坐标转换关系。读者将学习到如何确保外部轴能通过坐标方式运动,并理解同步轴配置的关键点。
本文档详细介绍了如何配置KUKA机器人的外部轴,包括创建样本文件、设置电机参数、耦合外部运动系统与机器人系统,以及定义坐标转换关系。读者将学习到如何确保外部轴能通过坐标方式运动,并理解同步轴配置的关键点。
在上一期中我们提到过一个马达文档,需要我们在文档上查询kuka的马达所对应的驱动大小,还有相关的系统变量参数。
这份文档我将放在公众号后台,等我上传完成后大家可以回复KUKA Motor Data来获取下载链接。
------------------------------------------------------------------------------------------------
这里我们来说是外部轴如何与机器人进行耦合,就是如何让外部轴可以实现通过坐标的方式运动。
我们来做一个两个外部轴(导轨)的案例
step1
首先我们需要自己建立一个外部轴的样本文件
打开WorkVisual 的文件安装位置,找到workvisualcatalogeditor应用程序打开:

在workvisualcatalogeditor中制作出我们所需要的两个外部轴的样本文件
这里需要注意的就是马达型号别选错了
step2
将这个文件导入到workvisual样本中,并添加到目录树
step3
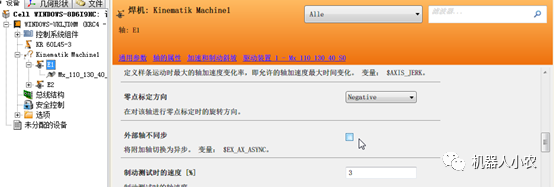
设置外部马达的相关参数:
注意如需配置同步轴“外部轴不同步”这里不要勾选
step4
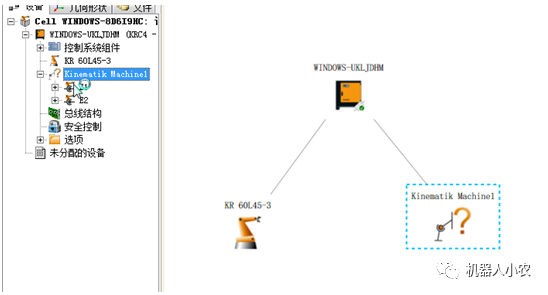
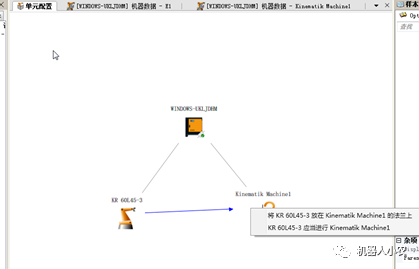
电机参数设置完成,开始对外部运动系统与机器人系统进行耦合:
此处我们配置的是导轨,即机器人安装在外部轴的法兰上,所以下面的选项需要选择“将KR60L45-3放在KinematikMachinel的法兰上”
step5
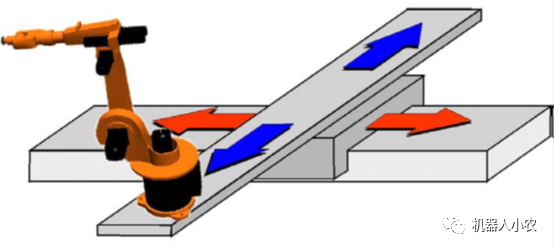
填写轴与机器人的坐标转换关系

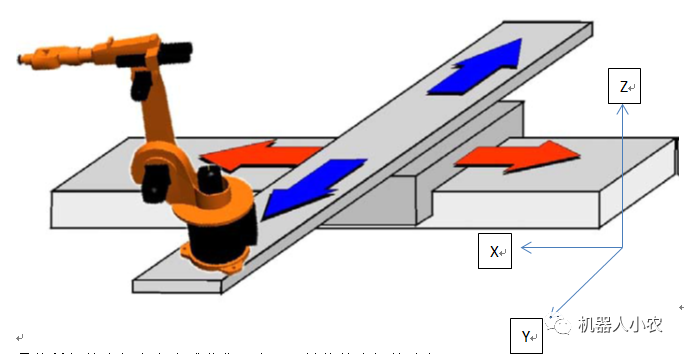
如上图,我们需要将坐标系调整到机器人的坐标一致,机器人坐标位置在机器人地址的中心,这里我们需要一级一级进行操作
首先是将坐标移动到红色箭头的导轨法兰并且确定方向Z轴。
$ET1_TA1KR= {x 0.0,y 0.0,z 600.0,a 0.0, b 0.0, c-90.0}
再将坐标移动到蓝色箭头的导轨法兰并且确定方向Z轴。
$ET1_TA2A1= {x 0.0,y 0.0,z 0.0, a 0.0,b 0.0, c-90.0}
再确定法兰和1轴之间的帧
$ET1_TFLA3= {x0.0,y 0.0,z 0.0, a 90.0, b 0.0, c-90 0.0}
以上就是外部轴耦合的配置过程。我这可能参数不一定准确,大家理解概念就好


















 533
533

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









