






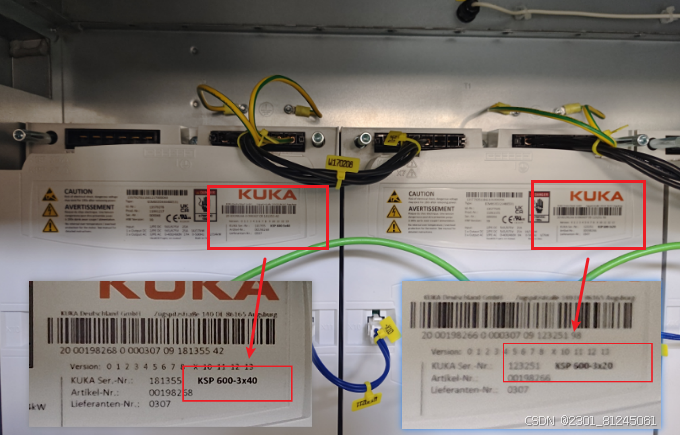
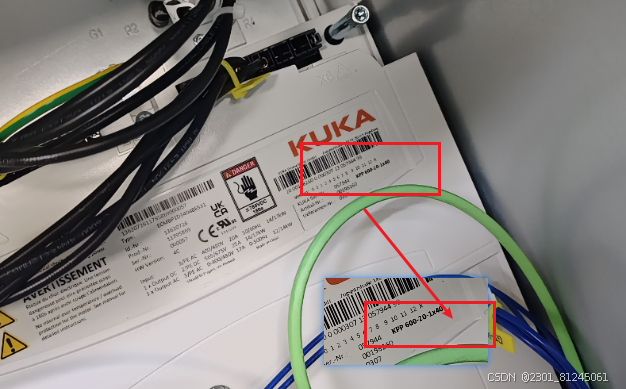
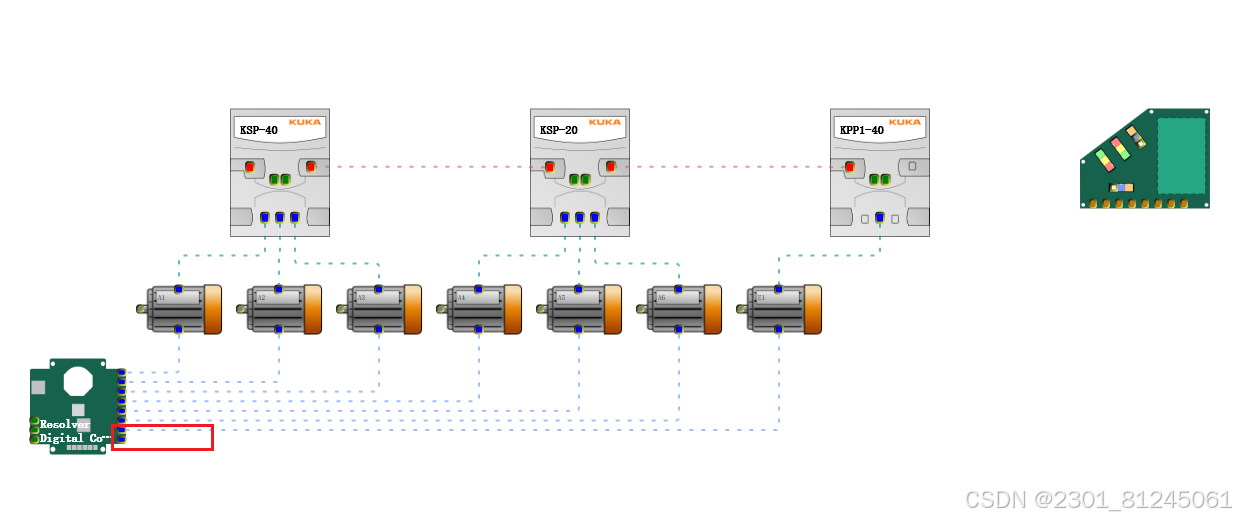
介绍:我的工控机内部从左到右分别是KSP 600-3x40、KSP 600-3x20、KPP 600-20-1x40。
KSP 600-3x40用来配置内部轴A1、A2、A3,KSP 600-3x20用来配置内部轴A4、A5、A6,
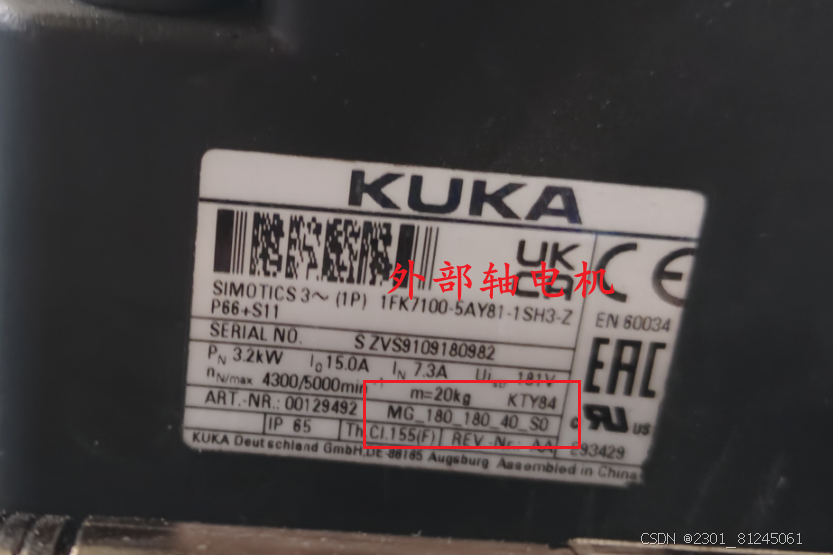
KPP 600-20-1x40用来配置外部轴E1、E2.等等。外部轴的驱动电机型号是MG_180_180_40_S0,如下图所示
下面将对外部轴进行配置:
1、连接控制柜和外部轴的动力线和编码器线

(外部轴动力线)

(连接机器人底部RDC编码器线)

2、Workvisual外部轴添加与配置
需要Workvisual6.0软件,相关配置我参考了b站的视频,链接在下方
kuka workvisual 系统配置软件_哔哩哔哩_bilibili
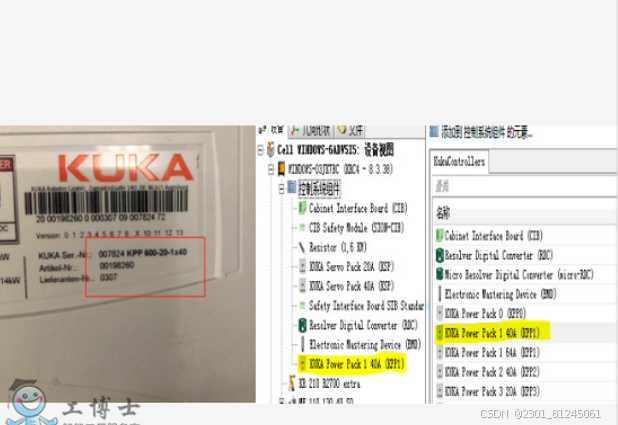
(1)根据机器人控制柜内部实际的KPP和KSP型号添加:
(右键控制系统组件添加)
(2)确认电机铭牌上的电机型号:
(开头MG/ME光轴与键槽轴的区别)
这个对应改为MG_180_180_40_S0

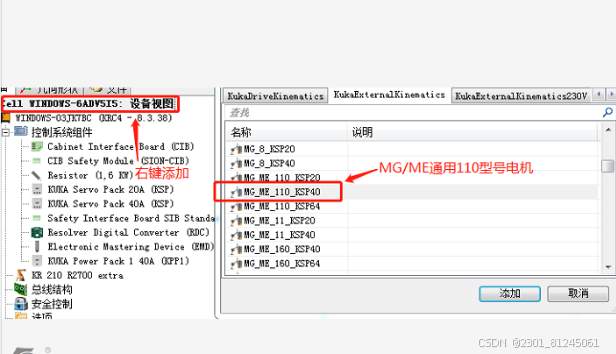
(3)根据电机型号添加选项:
(右键设备视图添加电机型号)
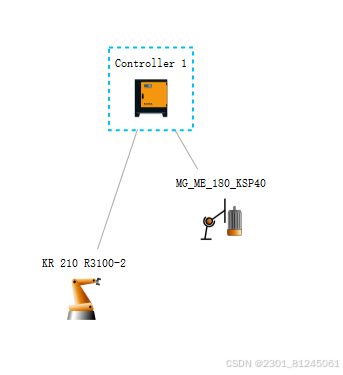
(4)在单元配置中将添加的外部轴电机与控制柜连接:
(拖住电机连接控制柜)
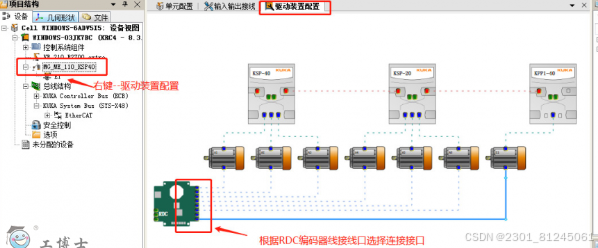
(5)右键电机--驱动装置配置--(根据实际接线图连接电机):
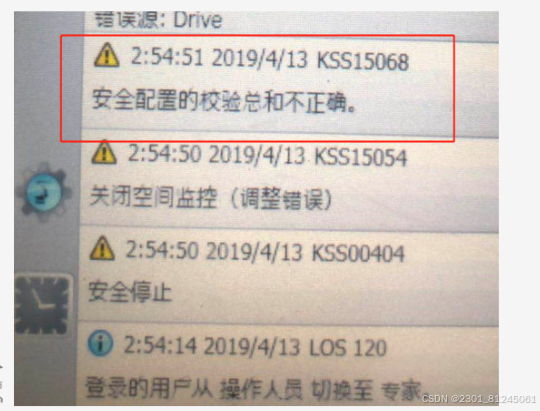
(外部轴电机连接错误,导入项目提示报警编码器故障):
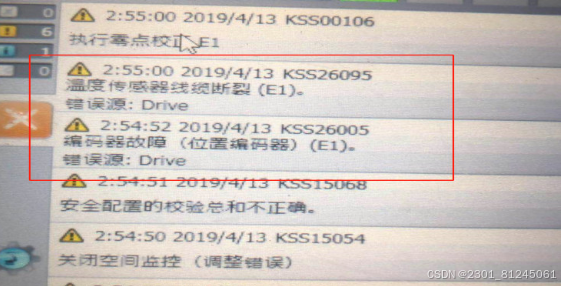
如果出现上述错误,这可能是接线错误,问题可能出现在下面这个接线处:
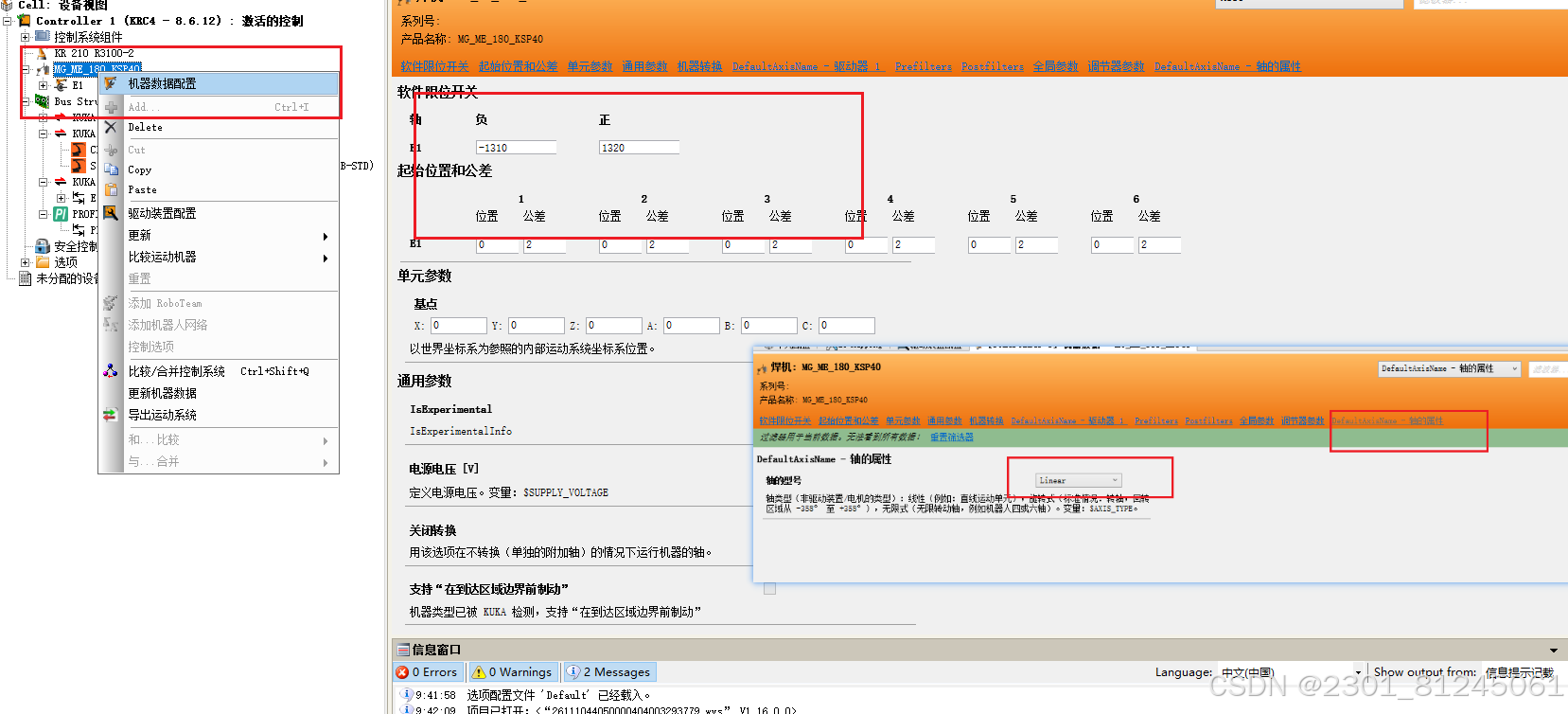
(6)右键电机--机器参数配置(配置电机需要的参数)
这里我只改了轴的的属性和限位,根据地轨是直线还是旋转,以及他的长度进行配置的
(7)配置完成后,项目编译导入机器人控制柜。
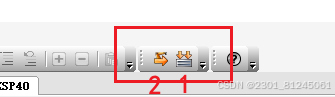
先点1生成代码,再点2进行安装,将文件配置到示教器上。
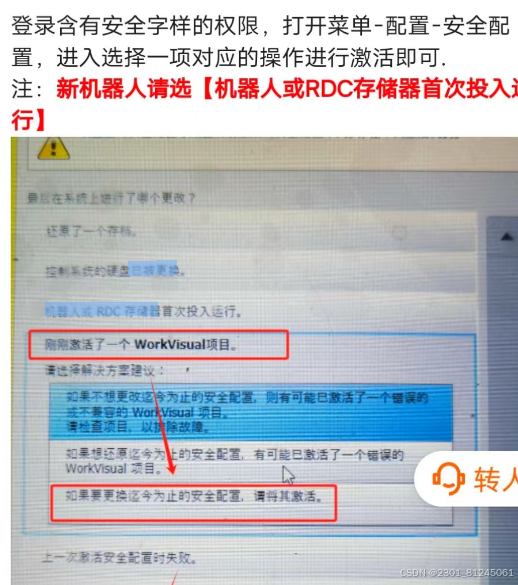
(8)导入项目后进行安全配置:(注意切换安全员用户)
(9)菜单-用户组-安全管理员
菜单-配置-安全配置,根据下图选项,将刚刚配置进去的文件激活,示教器会重启。
(10)外部轴零点丢失(进行零点校正):
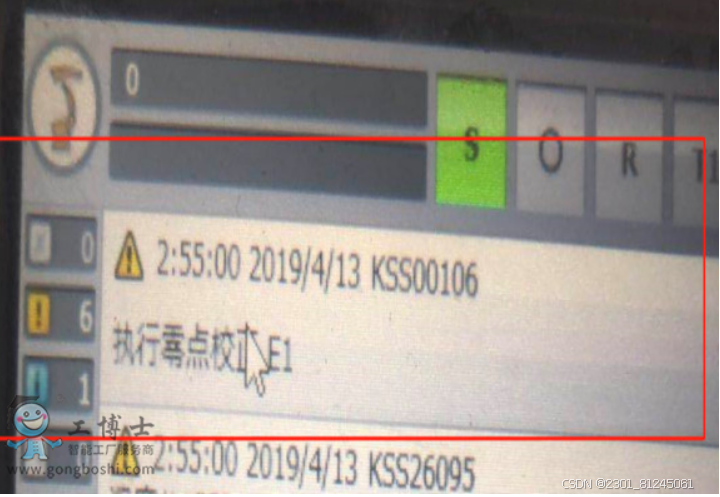
菜单-有个参考-标准校正,将机器人放在地轨合适位置,进行零点校正,将这个位置定义为0。如果矫正成功,界面会显示无轴可校正。这个跟之前workvisual的电机--机器参数配置的软件限位开关相关,后续可以进行调整,以防机器人因为超过极限位置撞到地轨边缘。
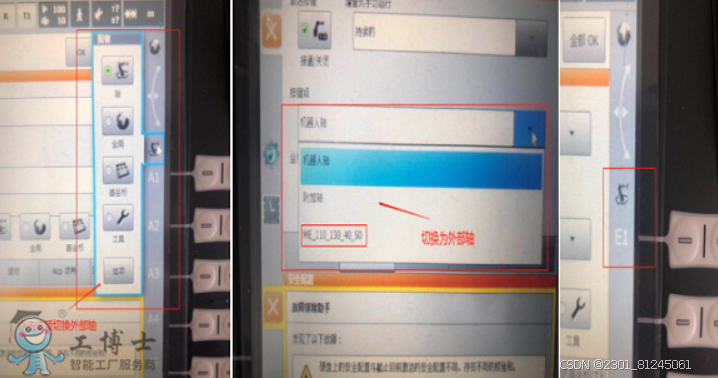
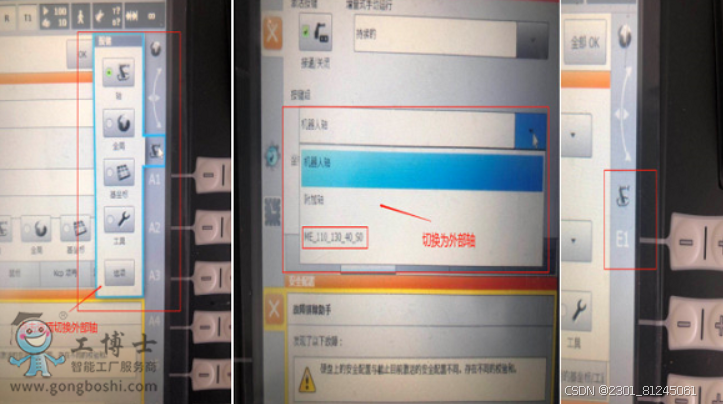
(10)外部轴动作方式的切换:
参考资料:
KUKA外部轴配置方法图文详解—库卡机器人示教器库卡机器人维修保养售后资料库卡机器人维保服务商

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









