







特定极对数的转子绕组又称为“Pole-Specific Rotor Winding”,最早是 Chiba 提出来为了简化无轴承感应电机的悬浮力的控制的。
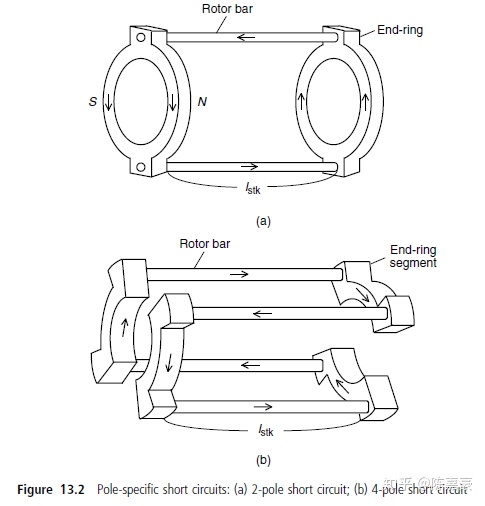
但是实际上,对于高速无轴承感应电机来说,这几乎是必然的一种做法,否则极对数不同于转矩磁场的悬浮磁场所感应出来的转子电流的频率(即滑差频率)将会很大,导致电机悬浮磁场遭到削弱,悬浮力大大减小,还将导致电机运行效率降低,不仅仅因为悬浮磁场所对应的转子电流的存在,而是因为产生悬浮力所需要的定子电流幅值也会大大增加。这里以一台设计参数为 4 极、30,000 r/min、50 kW 的无轴承感应电机为例(悬浮绕组为2极),在我的有限元仿真中,为了在额定运行时浮起转子,需要20%的额定电流用于产生悬浮磁场。
当然,从原理上讲,我们不一定要用导体棒,也可以用普通线圈绕制。为了方便大家理解,我用 SolidWorks 画了一个示意模型,渲染了一个视频(我不知道这个渲染是录屏的,所以我的一些日常操作也被弄进去了,大家无视就好,但是说起来操作这么迅猛看着还挺舒服),记得点高清!!!
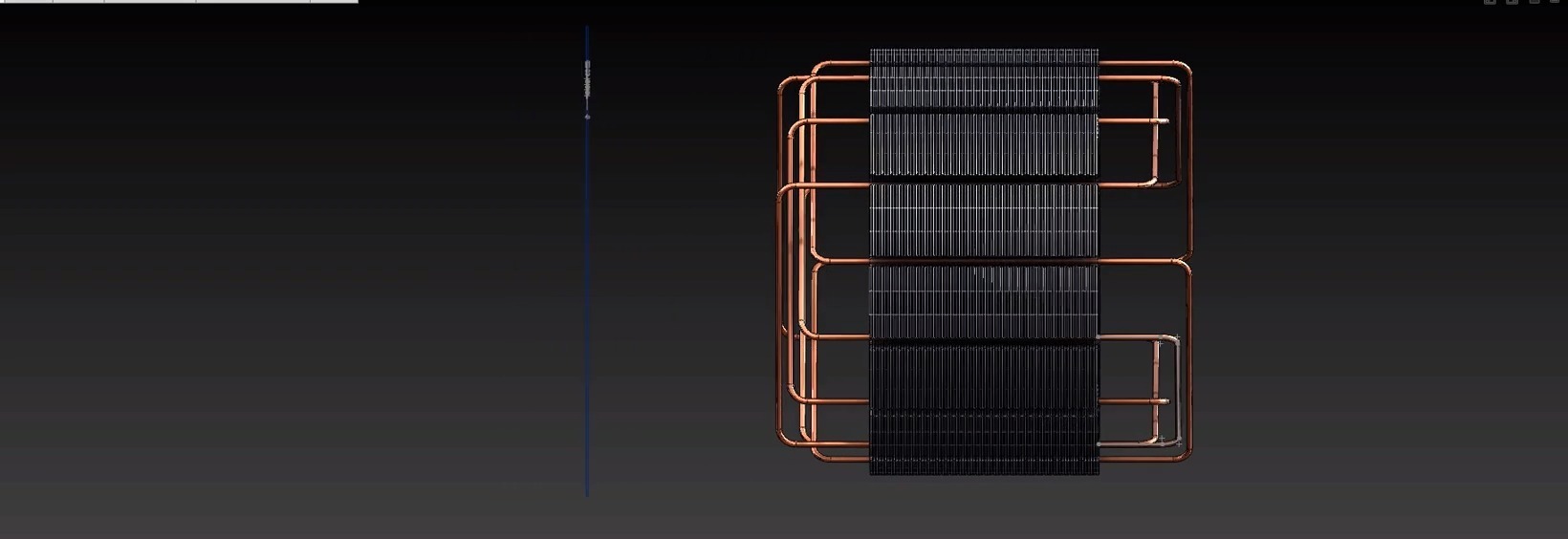
从视频中我们可以看到,转子槽数为 16 时,对于极数为 4 的电机来说,为了保证转子导电回路只感应 4 极转子电流,我们的转子端部绕组共有 4=16/4 层。这是在设计无轴承电机时相较于普通电机的一个特点,需要多考虑考虑转子槽数对于转子端部绕组层数的影响。
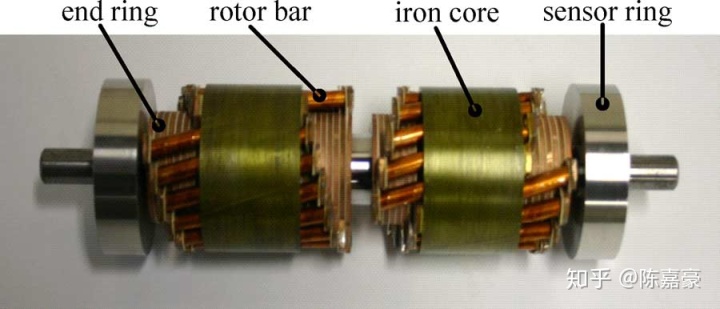
对于 2 极电机这更是一个坏消息,除去原来的在铁芯轭部长度上的“惩罚”,现在转子绕组端部层数上更是有劣势,对于转子槽数为 16,2极电机将有 8 层端部绕组。八层是什么概念?下图是 Chiba 的 32 槽 4 极电机,端部有 8 层:
扩展阅读:
另外一个对转子的感应电流的极对数有特殊要求的就是嵌套环转子,用于无刷双馈电机。
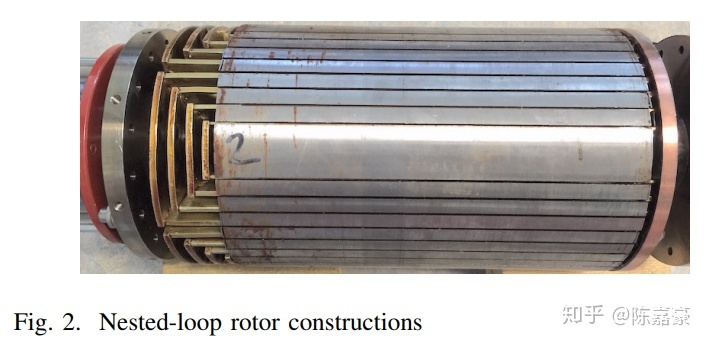
聪明的读者就会问了,我们的四极无轴承电机能不能也一端做成普通端环呢?
答案是,可以是可以,经过我的仿真试验,发现电机的悬浮力会大大减小,可能达到一半以上。这是因为,四极转子绕组如果做成一端完全短路,就会为二极转子电流的流通提供通路。而嵌套环转子的目的则不同,它是希望不同极对数的转子电流能够流通的,所以有了这一做法,减少端部长度。















 2621
2621











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









