






ROS Indigo beginner_Tutorials-04 创建ROS程序包(就是软件包)
我使用的虚拟机软件:VMware Workstation 11
使用的Ubuntu系统:Ubuntu 14.04.4 LTS
ROS 版本:ROS Indigo
下面我们就来在刚刚创建的 catkin_ws ROS 工作空间中创建第一个软件包:
简单的说就是创建一个 ROS 的工程,因为没有开发 ROS 程序的集成开发环境,所以我只能在终端上开发 ROS 程序:
你的 ROS 程序包都放到下面这个目录里, 切换到这个目录:
$ cd ~/catkin_ws/src使用下面的命令: 创建一个 ROS 程序包 名字就叫:beginner_tutorials
$ catkin_create_pkg beginner_tutorials std_msgs rospy roscpp程序包后面 是 依赖的程序包。(类似于 添加的头文件和链接文件)

Created file beginner_tutorials/CMakeLists.txt
Created file beginner_tutorials/package.xml
Created folder beginner_tutorials/include/beginner_tutorials
Created folder beginner_tutorials/src
Successfully created files in /home/aobosir/catkin_ws/src/beginner_tutorials. Please adjust the values in package.xml.进入 beginner_tutorials路径里看看:

打开 CMakeLists.txt 文件看看:
gedit CMakeLists.txt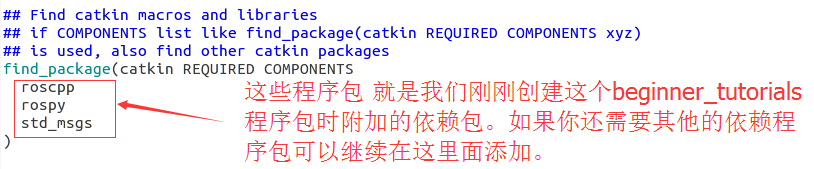
现在,我们还是来试一试,这个 catkin_ws 工作空间添加到环境变量后的效果,重新打开一个终端:

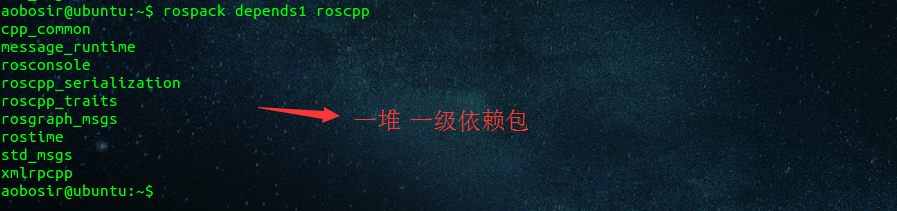
rospack 这个命令不但可以查找软件包的所在目录,还可以查看一个软件包的依赖包都有哪些:

罗列出来的这 3 个软件包中,比如 roscpp 这个软件包的依赖包又有哪些:
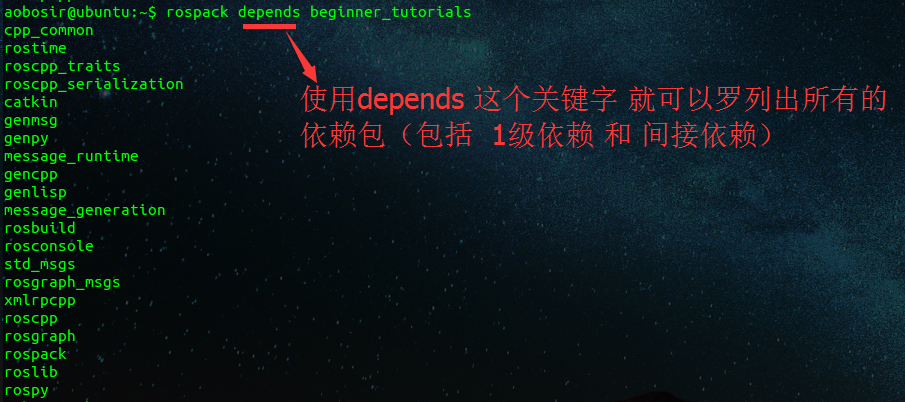
对有 beginner_tutorials 包来说,它的依赖包(roscpp、rospy、std_msgs)的依赖包,就是 beginner_tutorials 包的间接依赖包:
小小的总结一下:
上面的介绍的catkin_create_pkg是用来创建ROS程序包的。catkin_make:是用来编译程序包的。
接下来的这边博客,就来说一说这个 catkin_make 命令。















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









