






上一节我们一起学习了库卡机器人常用的编程指令,这一节我们一起学习常用的逻辑指令。废话不多说 直接上图:
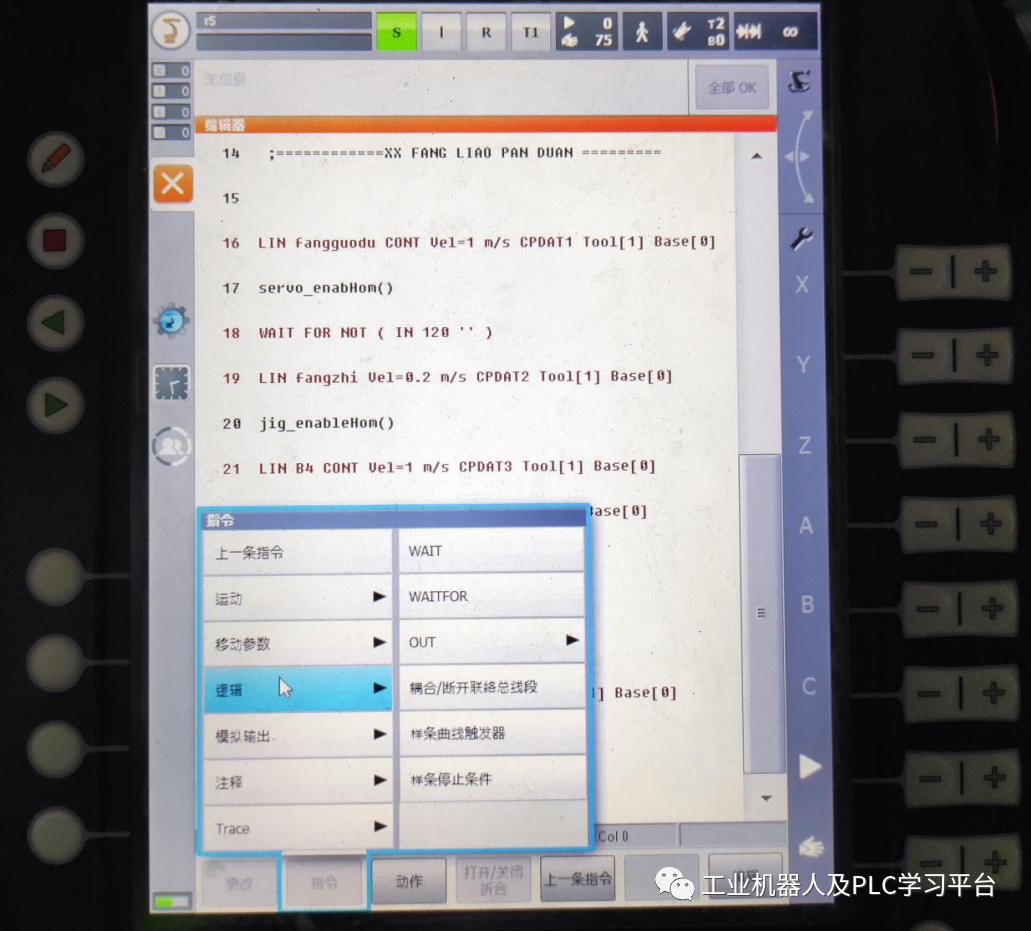
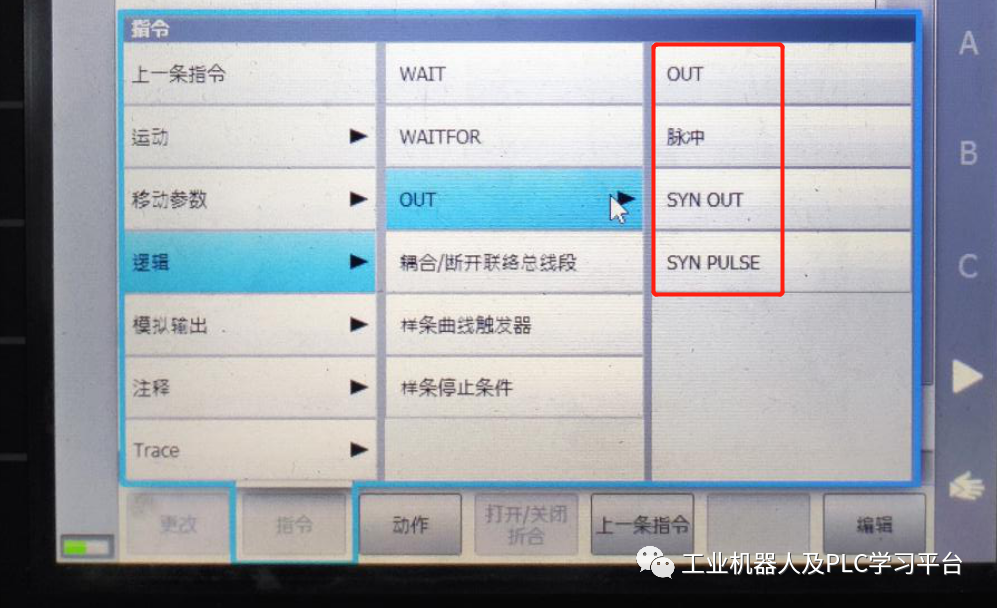
1、在示教器 T1模式下进入程序,左下角点击:指令—逻辑,会看到最常用的WAIT 等待、WAITFOR 等待、OUT 输出等逻辑指令。
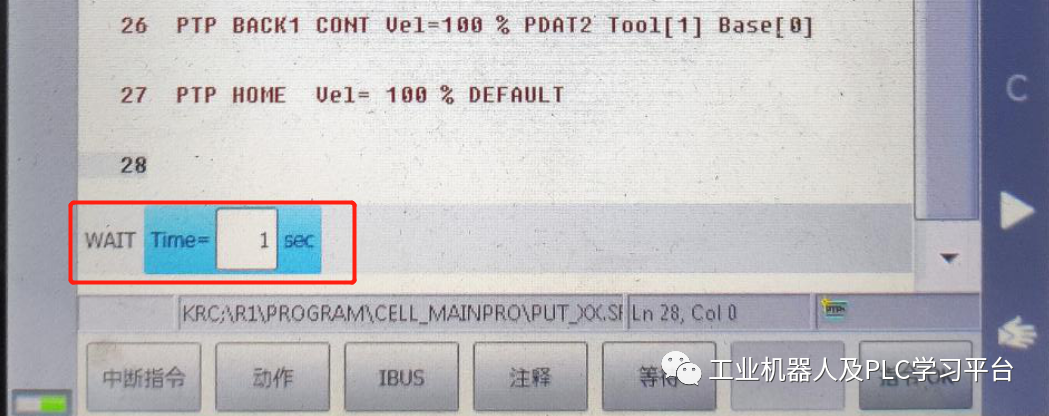
2、如图下所示:选择WAIT 。界面最下端出现WAIT Time 口 sec .这个WAIT 是等待时间时使用的,口 输入1 代表等待1秒 输入2 代表等待2秒.......
3、如图下所示:选择WAITFOR (这个WAITFOR是等待某信号时使用的,如等待输入信号IN)。界面最下端出现WAIT FOR 口(口口口口)口。
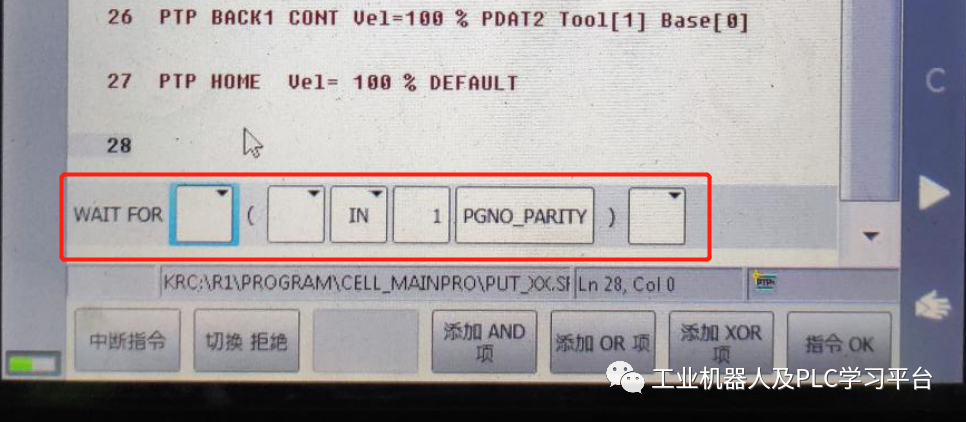

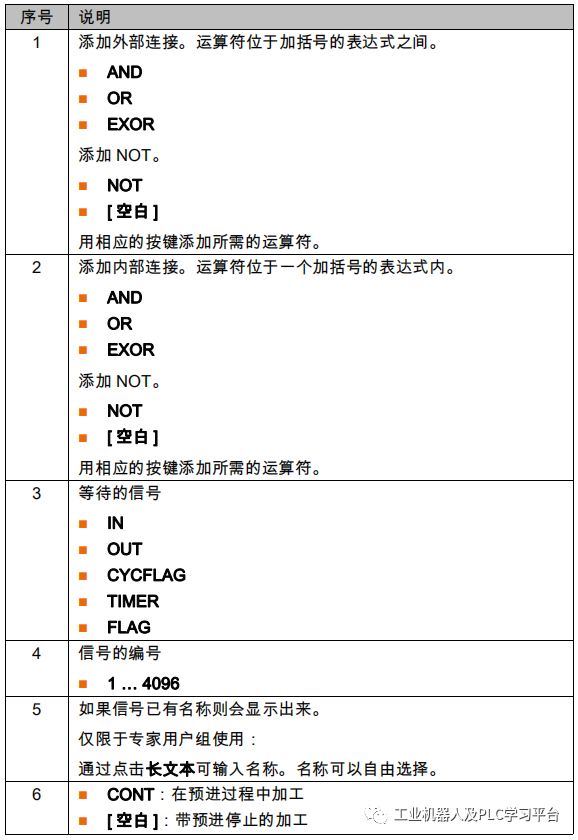
注:NOT 就是此信号取反的意思,CONT就是预执行的意思,可以理解为机器人不停顿执行此语句。
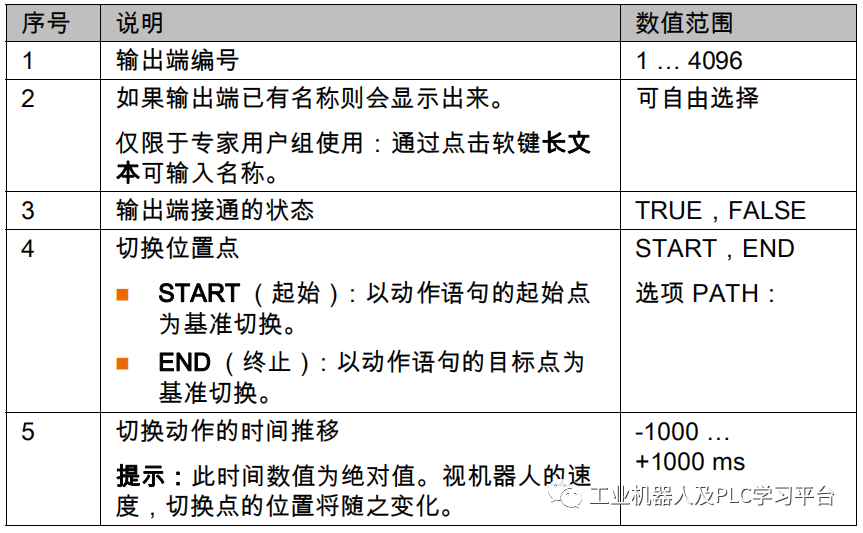
4、如图下所示:选择OUT (输出信号),右端会出现更多的选项,每一个选项的意思如下图所解释。
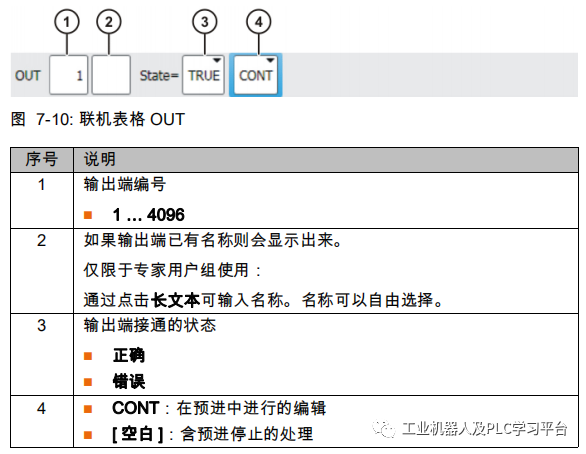

注意:OUT 输出信号③为TRUE时 信号是一直存在的,直到你重新把③中的TRUE设为FLASE复位掉
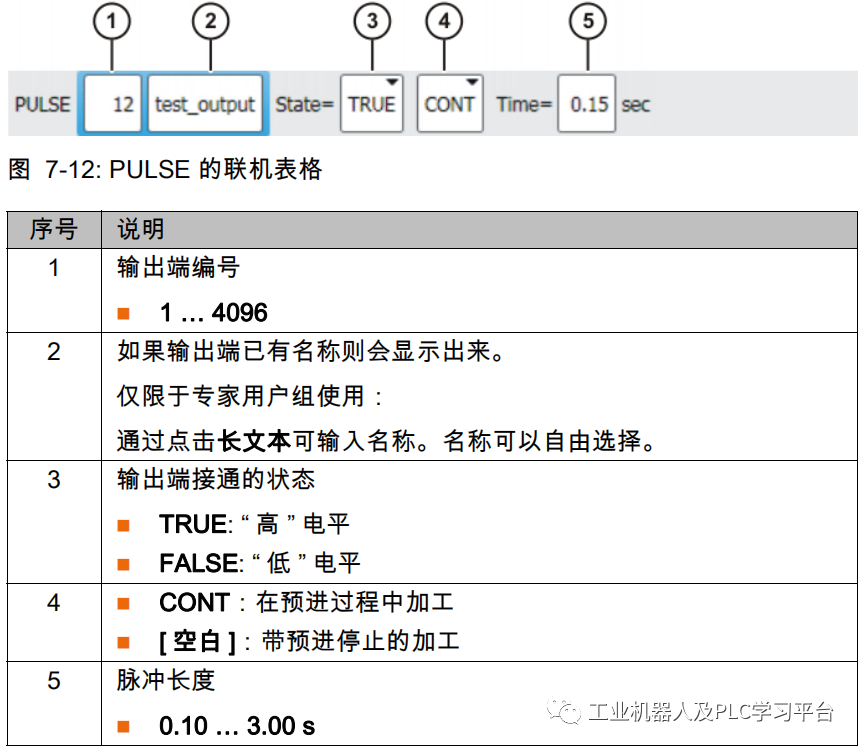
PULSE(脉冲)与OUT 不同,PULSE是在设定时间内⑤输出信号,时间结束信号随之结束,无须重新把③中的TRUE设为FLASE复位掉
5、PULSE 脉冲讲解:
6、带有SYN OUT 输出讲解:
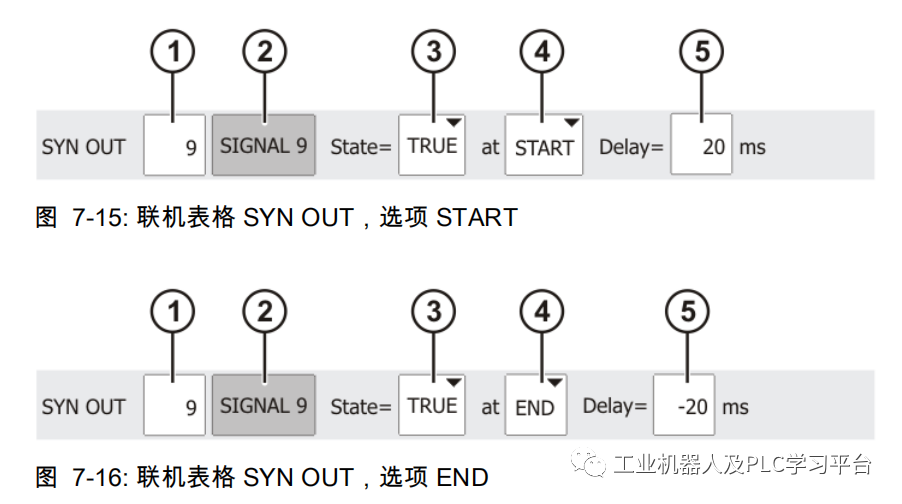
注意:连接表格中指令只有④与⑤不同 如下图运动轨迹是从P2点至P3点直线运动轨迹,表示从P2点开始延时20MS 执行SYN OUT信号的输出
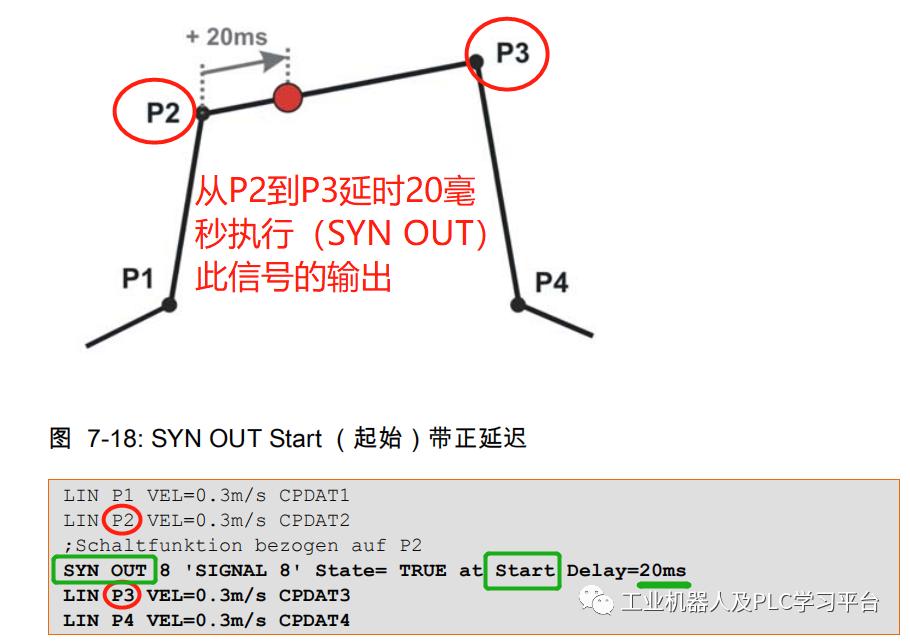
注意: 如下图运动轨迹是从P2点至P3点直线运动轨迹,表示到达P3点提前20MS 执行SYN OUT信号的输出

SYN OUT 可以理解为系统同步输出指令,多用于对点位信号输出要求较严格的工艺,例如 涂胶等。
举一反三SYN PULSE 用法与SYN OUT 相同,只不过SYN PULSE无须把③中的TRUE设为FLASE复位掉,而SYN OUT需要把③中的TRUE设为FLASE复位掉
以上就是KUKA机器人最常用逻辑指令,掌握以上指令可以应对百分之九十以上的自动化工艺需要。
好了废话不多说,快去练习练习吧!
下一节内容:学习KUKA_机器人PROFINET通讯

















 8759
8759

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









