




 本文详细介绍了KUKA机器人仿真的运动指令,包括PTP、LINE和Cric;逻辑指令如OUT、WAIT FOR、WAIT和PULSE;以及循环指令LOOP、FOR、REPEAT和SWITCH...CASE。通过实例讲解各个指令的创建和参数设置,帮助学习者掌握KUKA机器人的编程操作。
本文详细介绍了KUKA机器人仿真的运动指令,包括PTP、LINE和Cric;逻辑指令如OUT、WAIT FOR、WAIT和PULSE;以及循环指令LOOP、FOR、REPEAT和SWITCH...CASE。通过实例讲解各个指令的创建和参数设置,帮助学习者掌握KUKA机器人的编程操作。
目录
指令的详细介绍
1、运动指令和参数讲解
1.1、PTP指令创建
新建程序后点击动作创建,出现指令选择




1.2、LINE指令创建

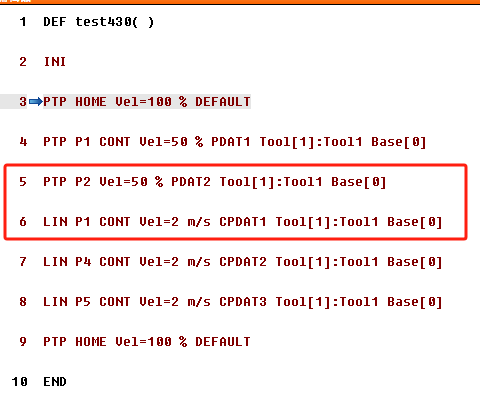
从P2到P1,关节在保持稳定的情况下,自动寻找一个最近的路径
1.3、Cric指令创建
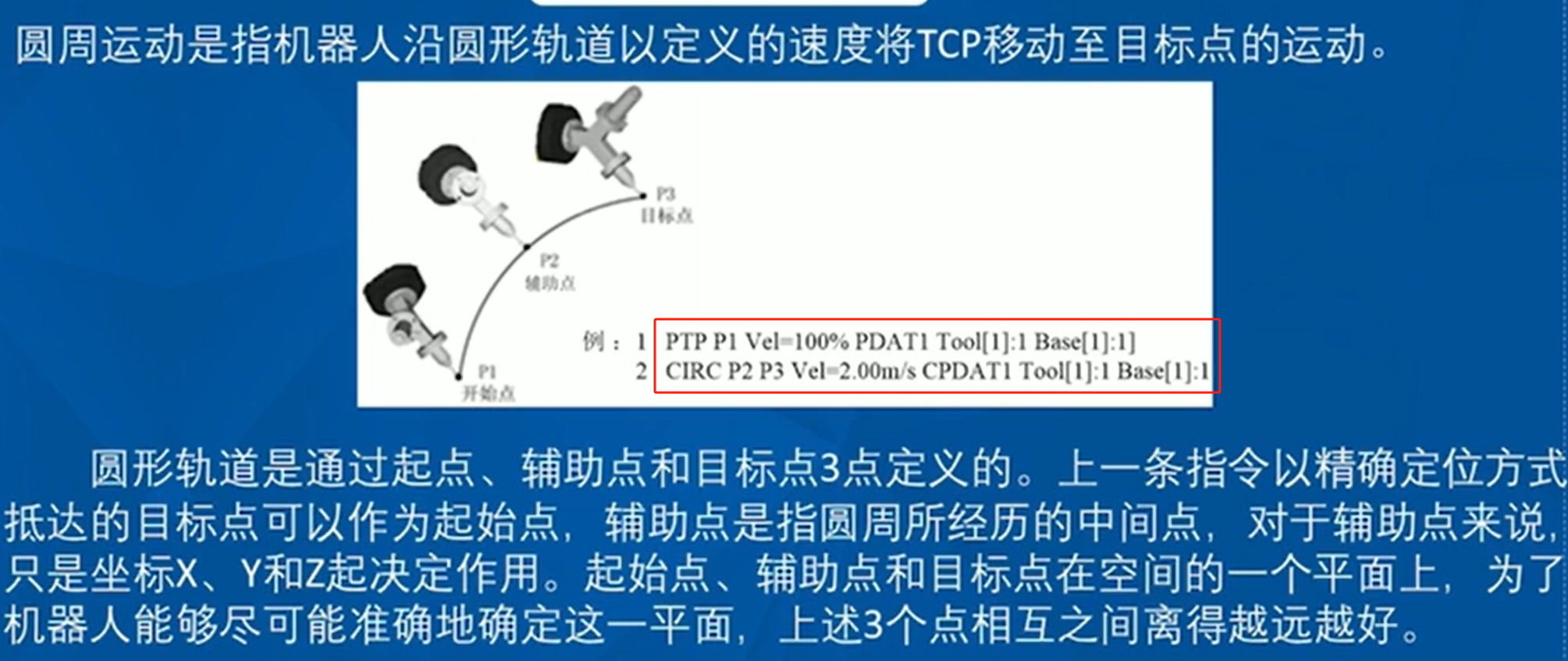
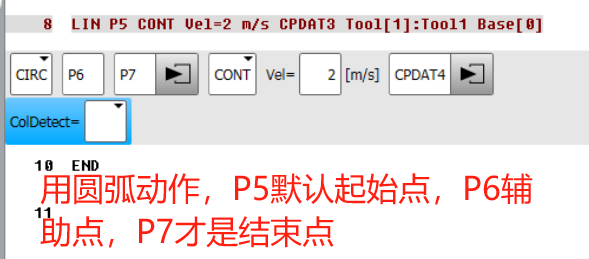
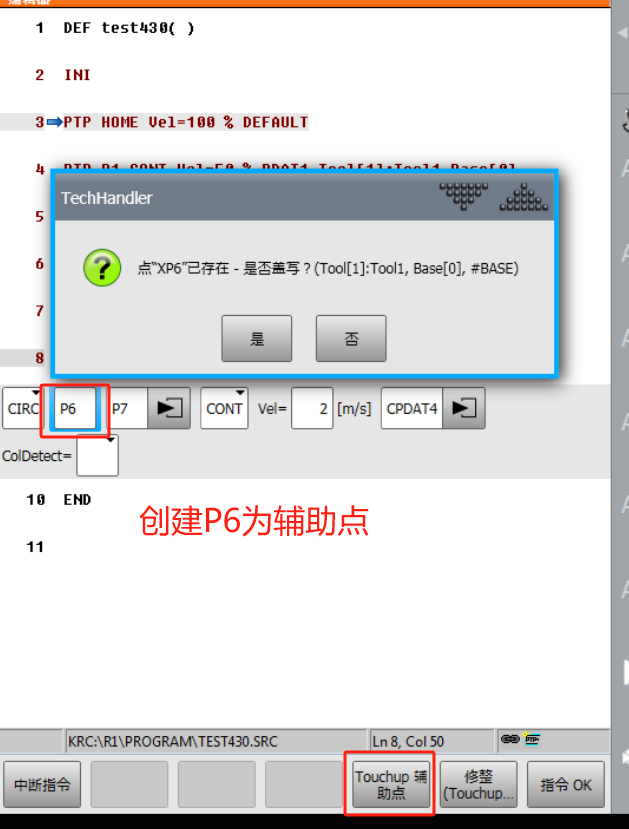
P7同理。指令OK。
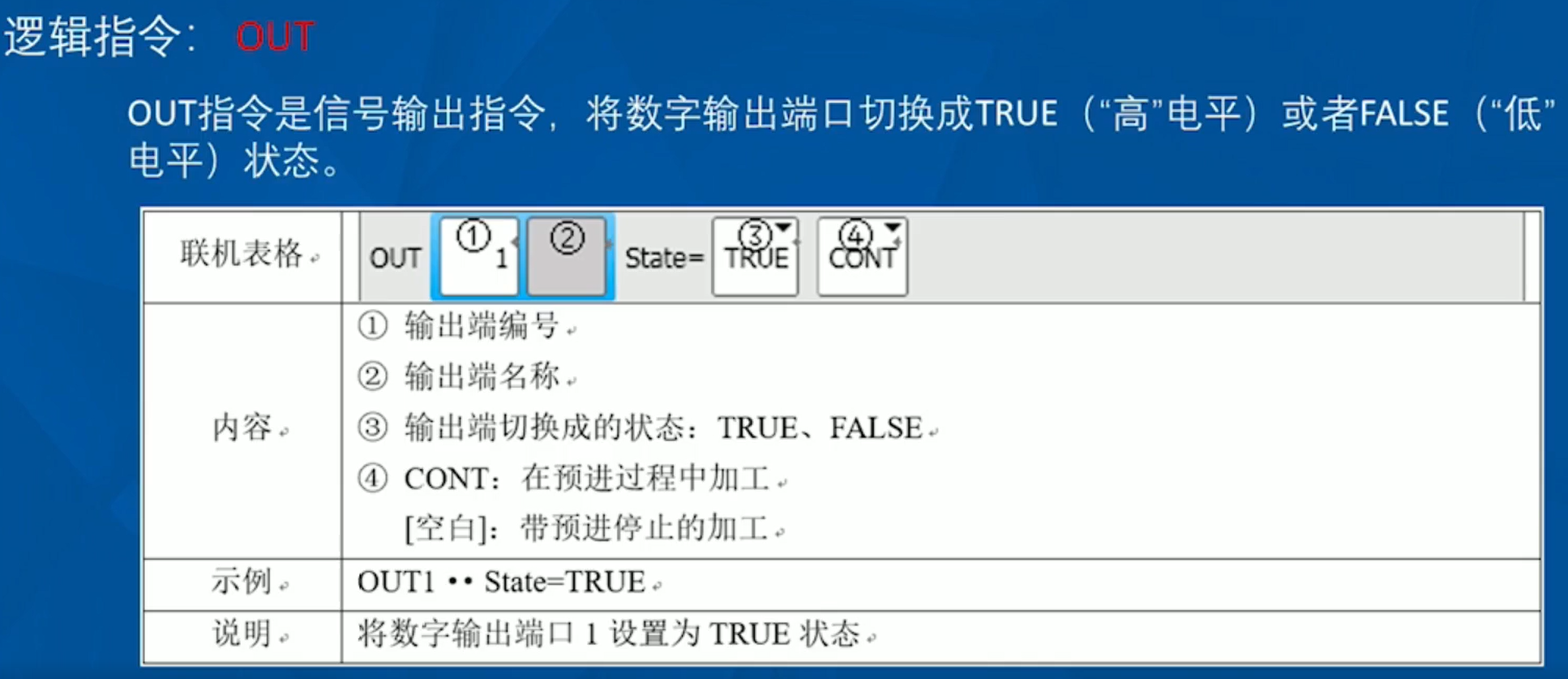
2、逻辑指令和参数讲解
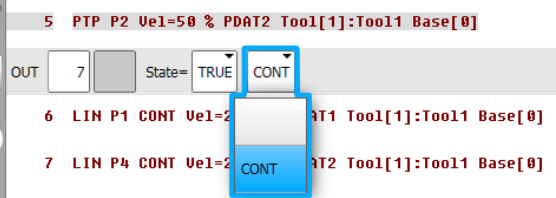
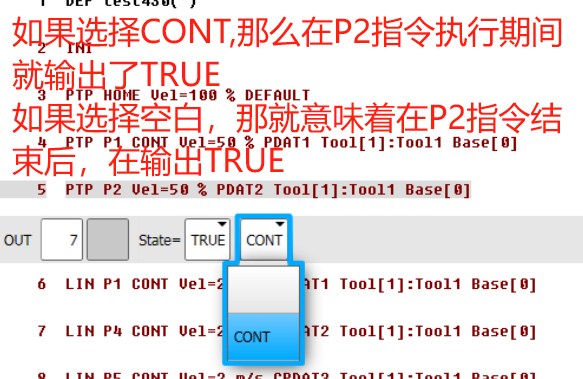
2.1、OUT指令创建
2.2、WAIT FOR(等待信号输入)指令
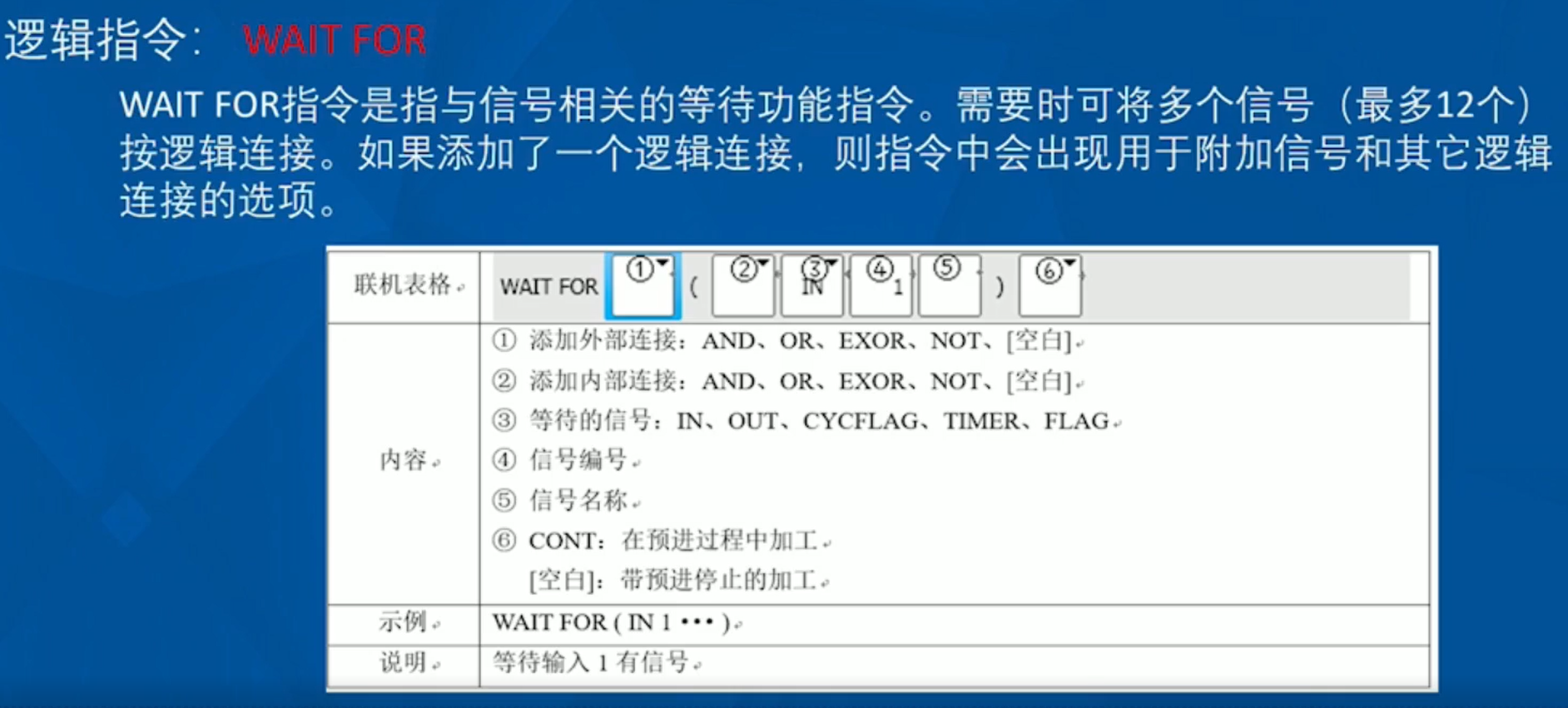
1是括号内全部取反,
2是后面信号取反
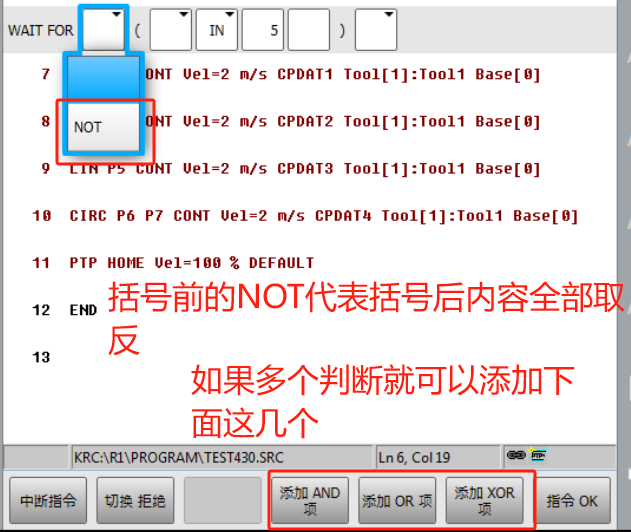

默认都是高电平没问题
当输入端1和5都是高电平,才认为ok
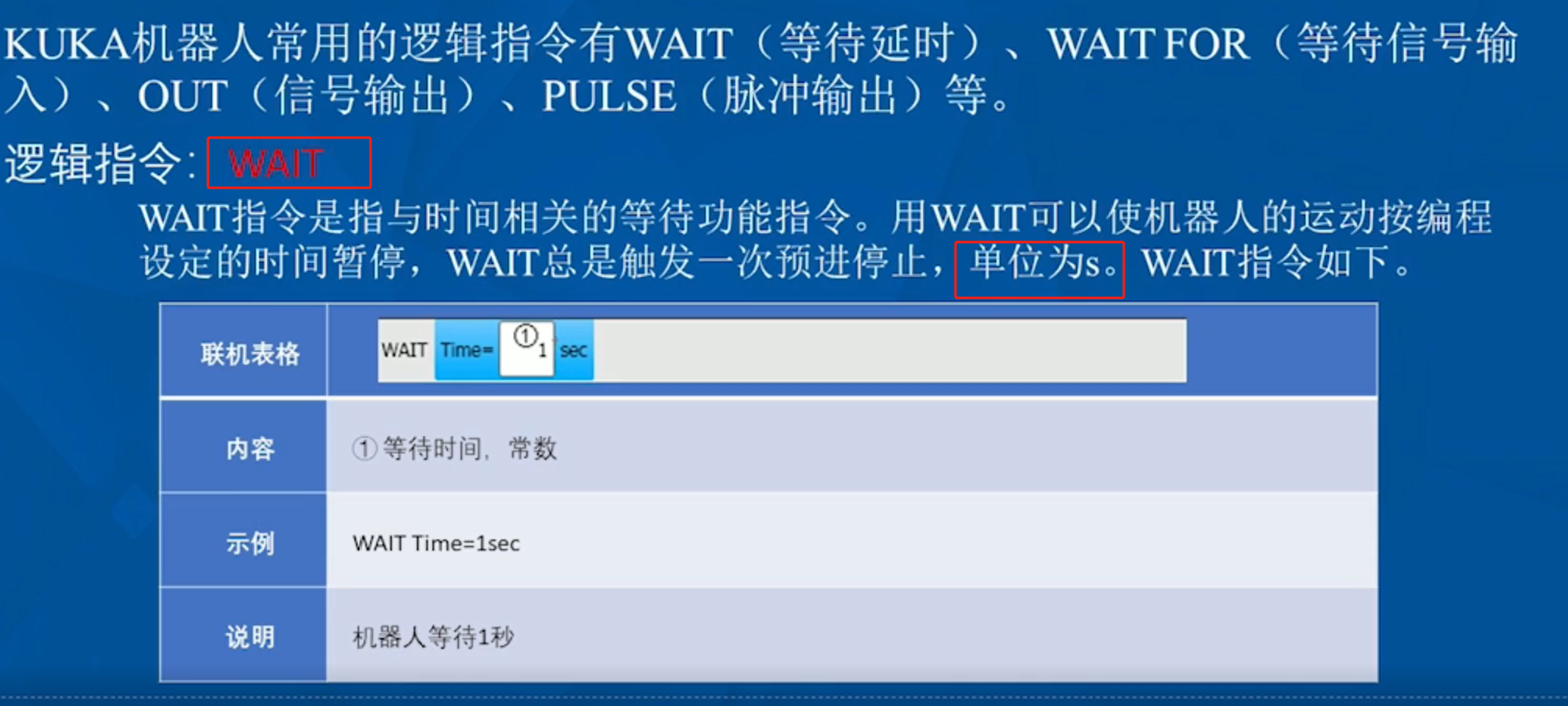
2.3、WAIT(等待延时)指令
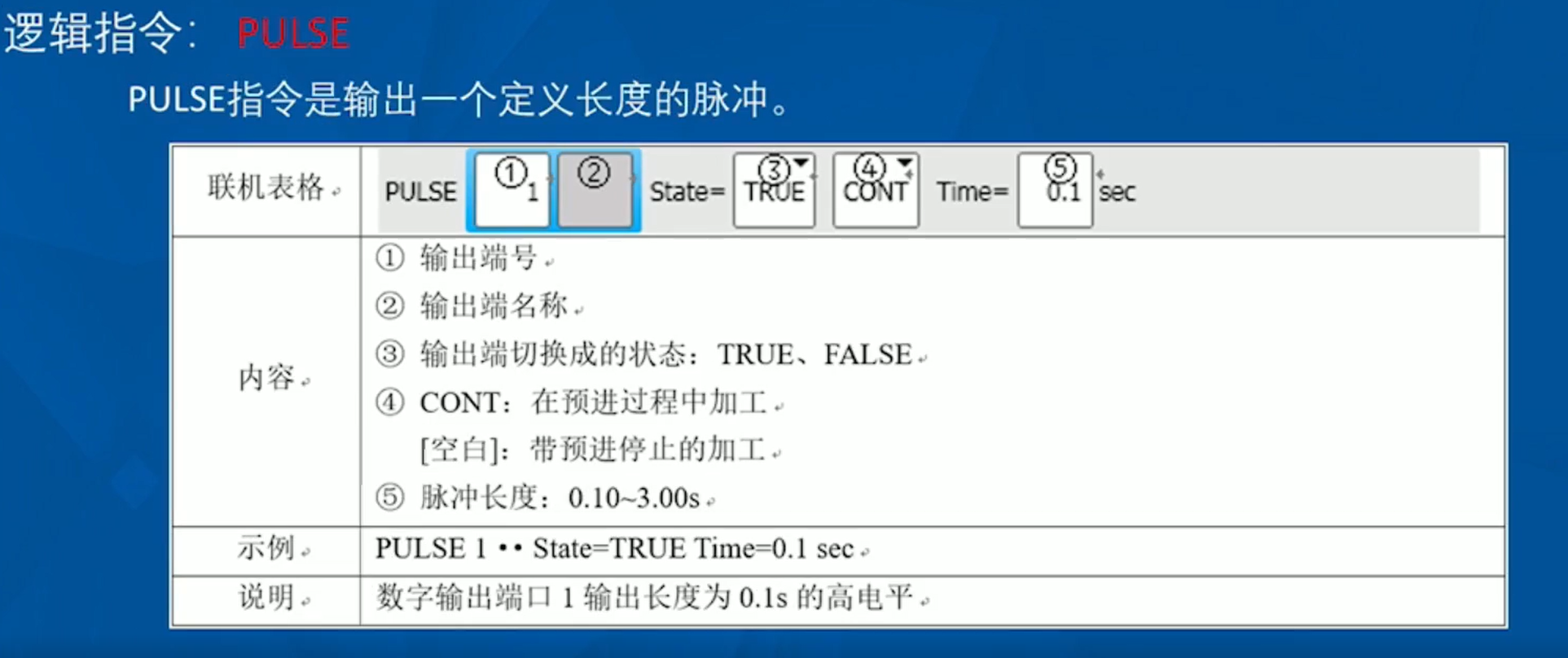
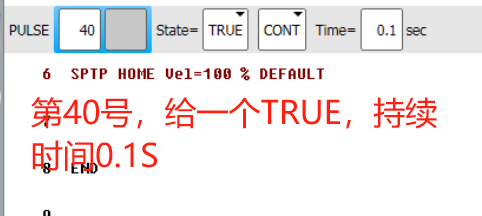
2.4、PULSE(脉冲输出)指令
3、循环指令和参数讲解
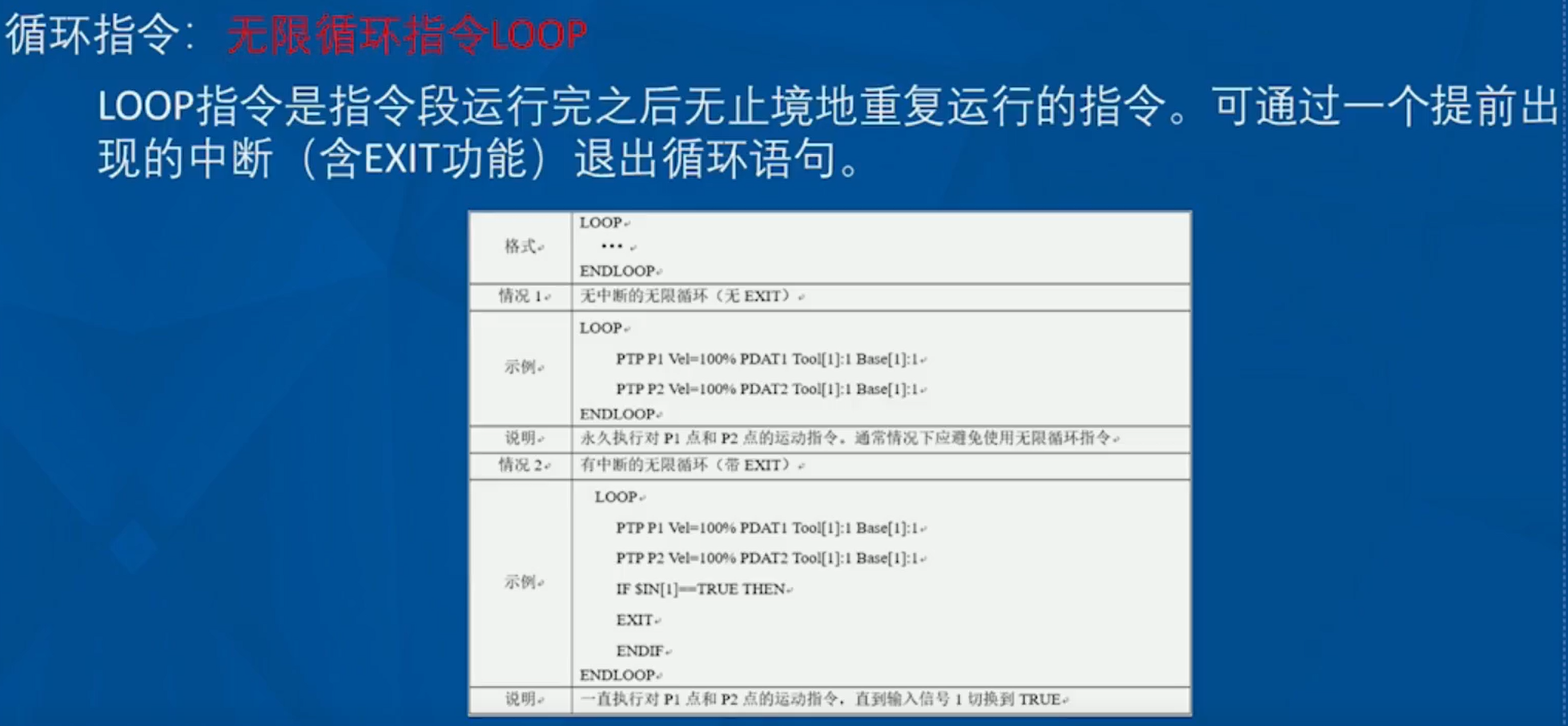
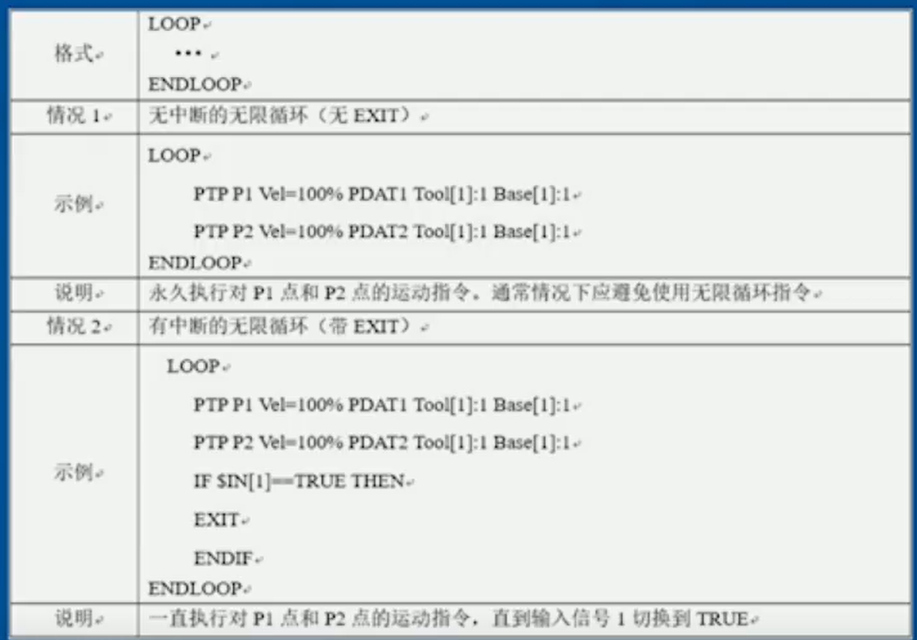
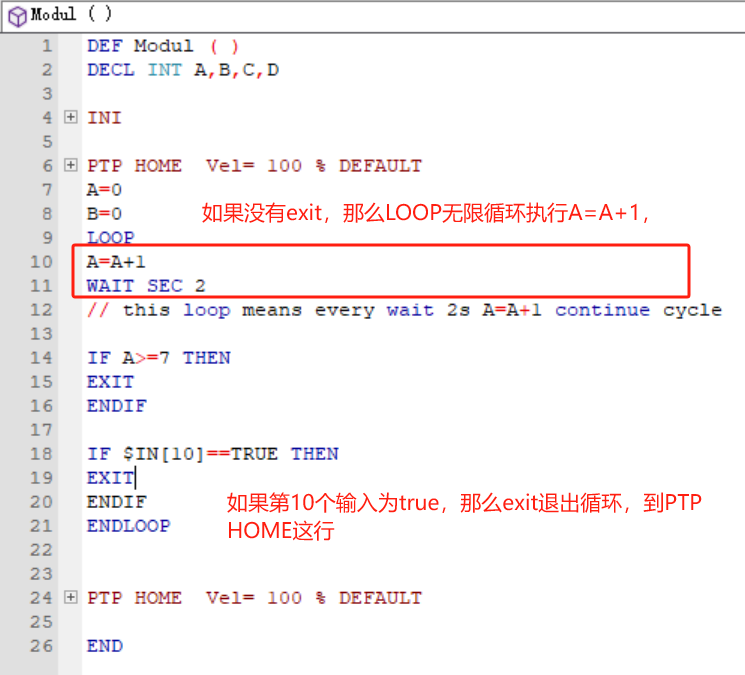
3.1、LOOP(无限循环指令)
3.2、FOR(计数循环指令)
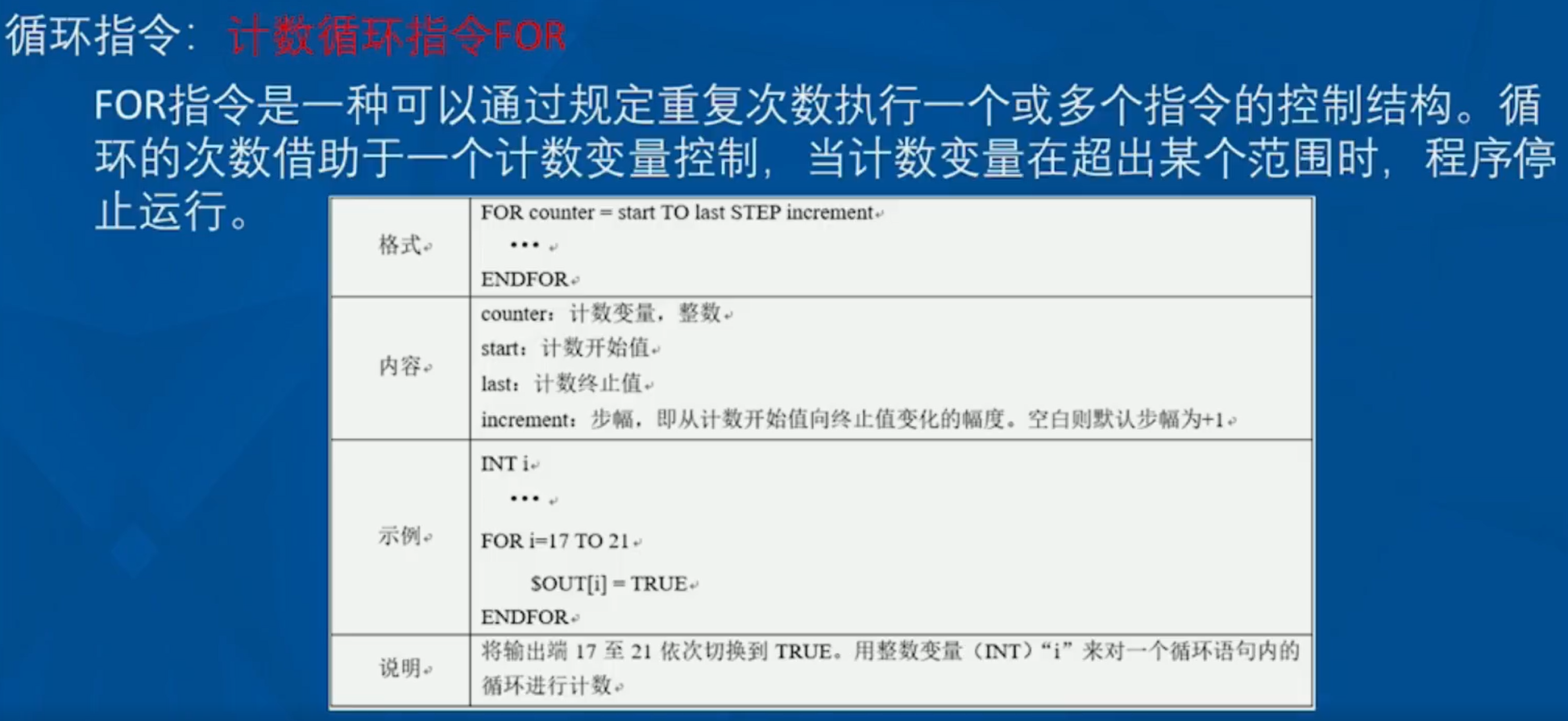
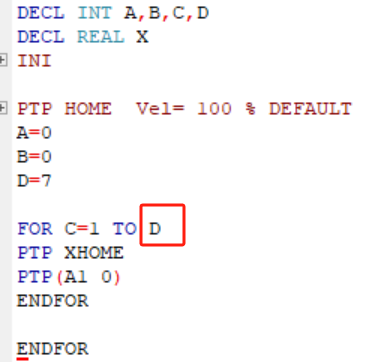
1、FOR循环只能对整型格式进行处理
2、他的循环次数只能是常量,不能是变量,这个时候D虽然赋值了7但是仍然报错
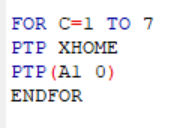
3、FOR中不断的执行HOME点和回到A1的零度,执行到7次自动结束
3.3、REPEAT(直到循环指令)
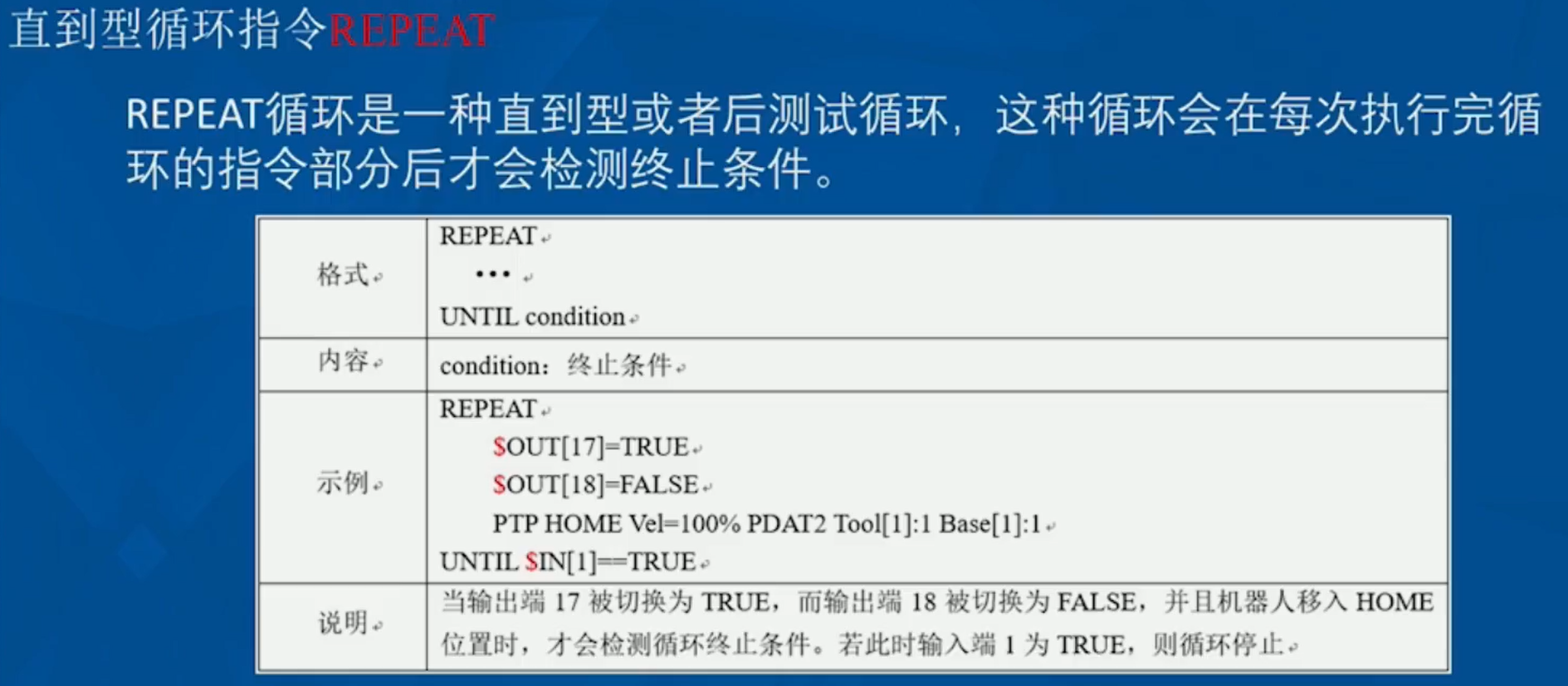
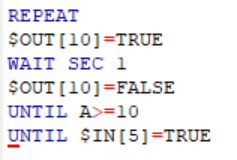
输出端10一直高低电平重复,直到A>=10才结束,until 后跟bool值
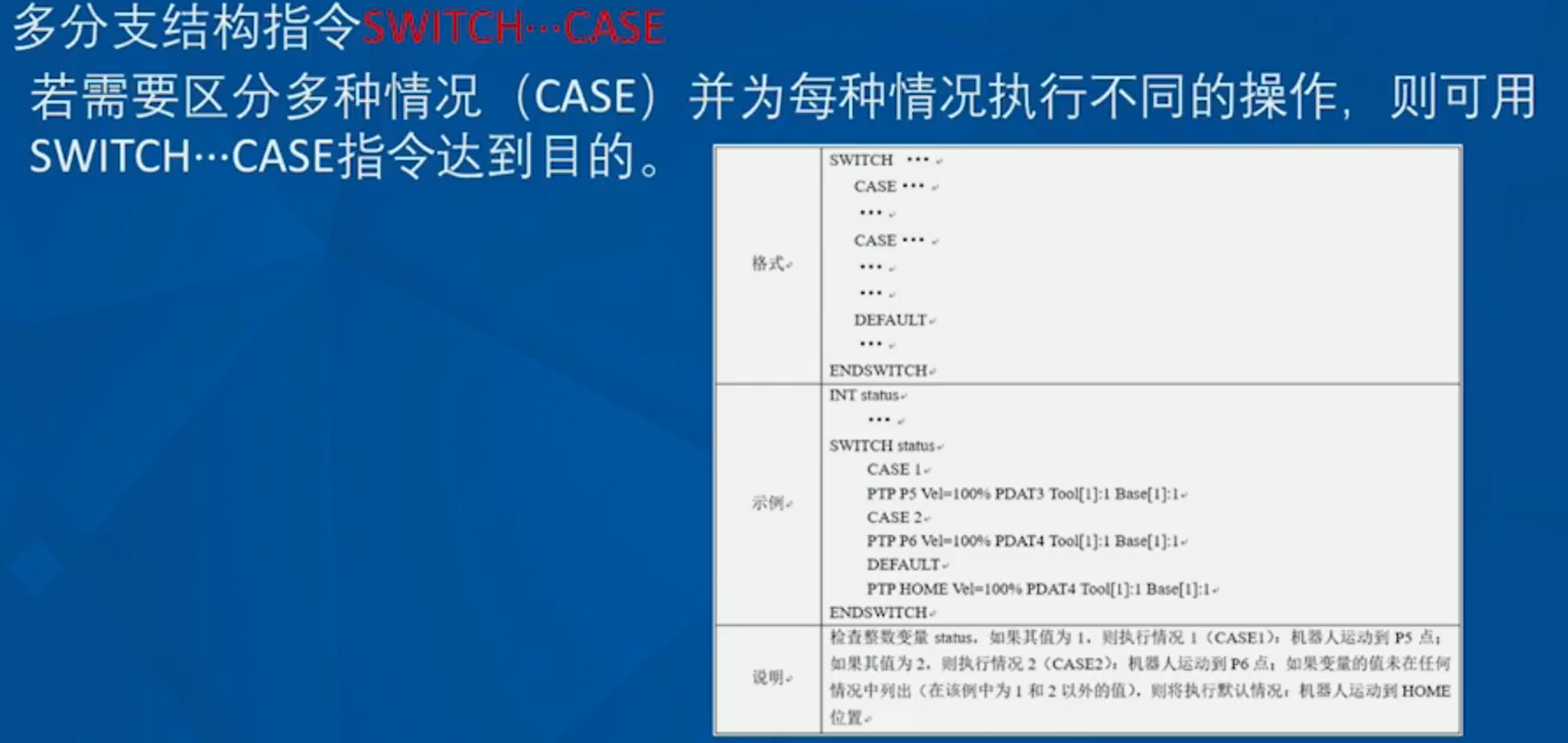
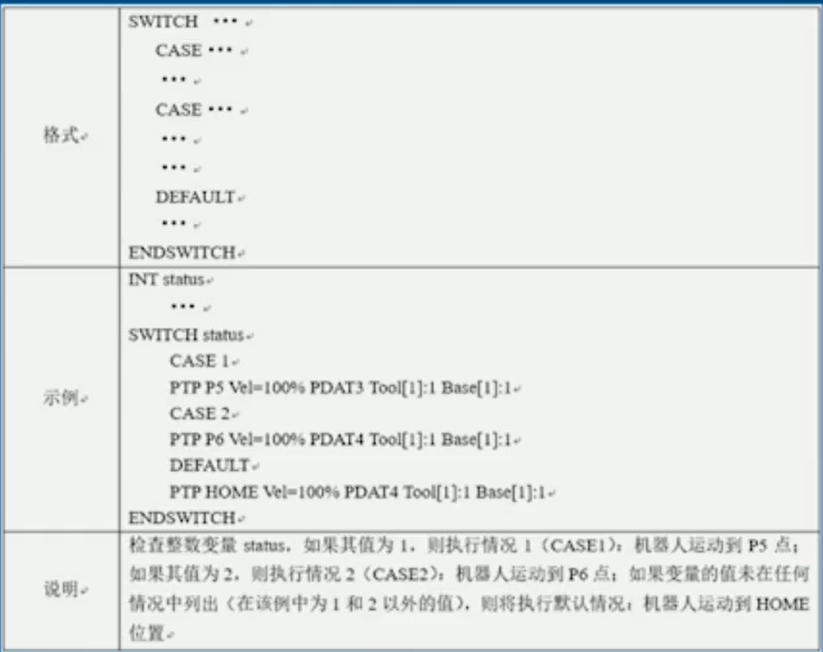
3.4、SWITCH…CASE(多分支结构指令)

















 820
820

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









