






 本文揭示了工业机器人集成中的常见误区,重点讨论了低估有效负载和惯性距的问题。通过ABB RIB6700-200机器人实例,展示了负载能力如何随工具重心偏移而变化,强调了工具重心和转动惯量对机器人承载能力的影响。文章还介绍了机器人各轴运动方向,并提示使用专业软件进行负载计算的重要性。
本文揭示了工业机器人集成中的常见误区,重点讨论了低估有效负载和惯性距的问题。通过ABB RIB6700-200机器人实例,展示了负载能力如何随工具重心偏移而变化,强调了工具重心和转动惯量对机器人承载能力的影响。文章还介绍了机器人各轴运动方向,并提示使用专业软件进行负载计算的重要性。
工业机器人集成设计中需要避免的十大误区,那么现在来详细介绍一下误区之一低估了有效负载和惯性距。一般机器需要安装的工具有很多种,这里以抓持器为例子来进行介绍。
工业6轴串联机器人,其负载能力随着重心的偏移,会急剧降低。这也是在各种工具设计时要避免的情况。
以ABB RIB6700-200机器人为例:

机器人真实机体

200KG机器人负载承受与工具质心位置相关关系数据

200KG机器人相关数据
如上图所示为:当五轴向基坐标Z正方向,与Z负方向时,其所能承载的工具重量与距离比例图。
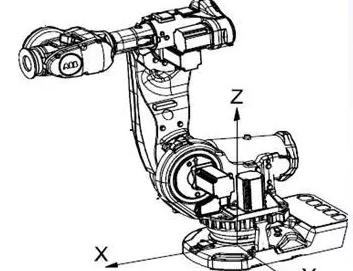
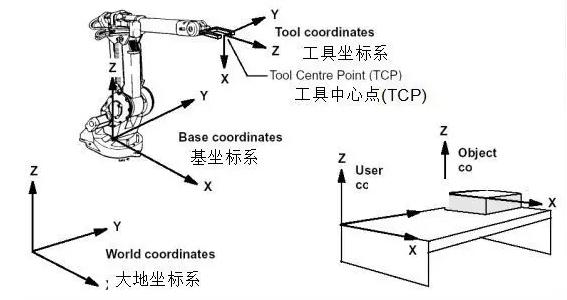
机器人基座标示意图
做为一篇科普文,最麻烦的事情的就是出现一些新的名词。为了很多刚刚入行,或者正在学习的机器人应用技术人员学习,这里介绍一下机器人各轴如下图所示
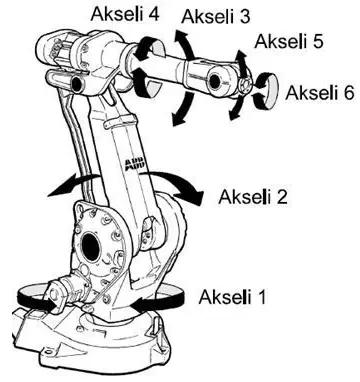
机器人各轴运动方向
下图是机器人五轴处于原点位置时的机器人负责情况。我们来详细解释一下此图
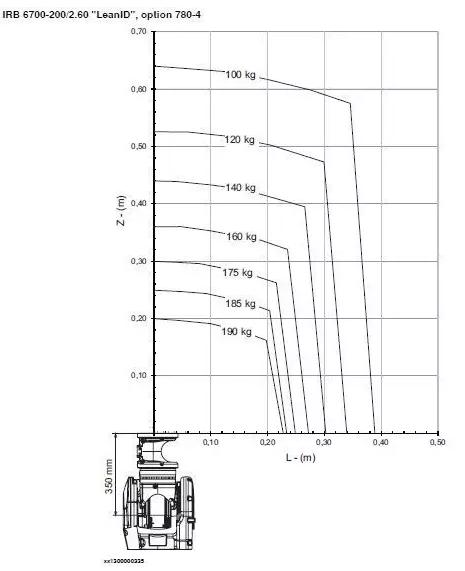
从上图可以看出当工具中心距离机器人六轴安装法兰沿着基座标Z正方向200mm时,L( L= sqr (X2 + Y 2 ))负方220mm向其负载可承受190KG,但是在Z方向300mm处,机器人负载175KG,而L方向300只能承载140KG。
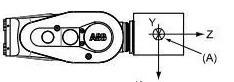
工具坐标注意上图上标示的Z方向是工具坐标方向,与基础坐标X相互重合。工具坐标与基座标的关系如下图所示。
所以机器人的工具重心是影响机器人承载能力的关键因素。重心距离机器人法兰轴越远工具坐标Z方向,其承载能力成抛物线递减,而L方向递减的更为剧烈。所以工具在设计时其重心尽量避免在L方向出现过远的偏移。
转动惯量是考虑机器人负载能力的另一项指标。以6700系列样本说明允许值为例子。如下图
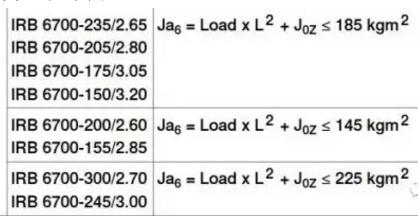
从图表中可以看出6700-200六轴允许的最大转动惯量145KGM计算出来的L与Z的转动惯量之合不能超过145KGM2
所以工具的负载在Z方向上可以适当的放款。但是要严格控制X与Y方向的偏移如下图。
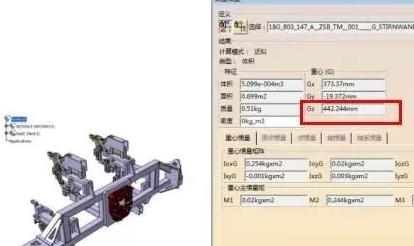
CATIA工具设计后进行材质添加计算质心
而实际工作中机器人的负载计算并不需要设计人员来进行演算。主流软件与主流机器人品牌公司都有软件来完成计算工作。我会在下一篇文章中进行详细介绍。

















 2323
2323

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









