







VINS-Mono是一套较为完善的基于非线性优化的Visual-Inertial 系统,和此前基于滤波方案的MSCKF系列以及更早的一篇基于非线性优化的OKVIS,算得上是几篇非常值得学习的视觉定位框架,这三类都有着各自的特点。
先说说MSCKF吧,原版的作者没有开源相应的代码,但是Kumar机器人实验室的ke.Sun有基于MSCKF的思想开源了基于双目MSCKF代码https://github.com/KumarRobotics/msckf_vio, 和对应论文[1];代码写的非常的整洁,注释也非常清楚; 另外宾大Daniilidis组开源了一套单目视觉惯导代码https://github.com/daniilidis-group/msckf_mono, 其核心代码应用在一篇基于even的paper[2];基于滤波框架的VIO,融合通常由EKF完成,其中IMU的积分(现在更多使用预积分的方式表示其观测)用于状态传播,而视觉位姿用于待优化状态变量的更新。MSCKF在状态向量中维护以前的几个camera pose,并使用多个camera视角中相同特征的视觉观测来形成多约束更新。后续有时间想整理一篇读书笔记,展开阐述MSCKF的pipeline和后续的扩展优化。
网上关于这几篇经典paper的论文解析,博客,甚至代码解析都非常多。我这里主要对自己的一个读书笔记总结,很多方面不够系统全面。VINS-Mono是港科大沈劭劼老师组中具有代表性的一篇工作,沈老师师从宾大的Kumar教授。沈老师多次表示VINs-Mono的应用更应该称做单目视觉惯性状态估计器而不是视觉惯性里程计。下图主要是VINS-Mono的框架:
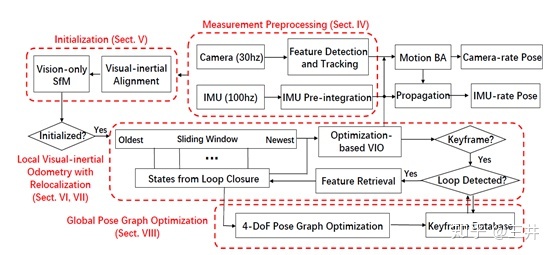
Vins-Mono paper[3]的结构主要包括5个大模块:
1) Measurement Preprocessing
2) System Initialization
3) Local Visual-Inertia BA and Relocalization
4) Global Pose Graph Optimization
5) Loop detection
6) Experimental Analysis
VIN-Mono的核心是一个紧耦合,滑动窗口,非线性优化单目视觉惯性里程计, 不仅提供精确的局部姿态、速度和方位估计(PVQ),而且还能够在线进行Camera、IMU的外参校准以及IMU偏置校正。这篇工作是在沈老师组里一系列工作基础上的一个集成和优化,主要包括[4]-[7],这四篇工作逻辑也很清晰,都是沈老师和学生关于视觉惯导鲁棒初始化、在线外参估计和校准、以及视觉惯导系统框架等不同侧重点的研究。相比上述的几篇工作,Vins-Mono改进了含偏置校正的IMU预积分、紧耦合重定位、全局位姿图优化这几个方面。先简单引入paper中的一些坐标表示:
1. Measurement Preprocessing
1.1 视觉前端的预处理
视觉部分使用KLT光流对前端进行持续的追踪,同时会detect新的corner,保证每帧都能有足够的feature和其他帧构建constrain,并且做了均匀化操作,相比ORB_SLAM前端的精细均匀化,VINS-Mono的前端主要通过一个mask限制corner之间几个pixel的间隔。其次,对观测outlier的剔除其实做的也很简单,主要使用RANSAC通过基本矩阵模型来判别,为了保证系统的高效性,在前端的特征track的过程中引入KeyFrame,而KeyFrame的选择满足以下条件之一即作为KeyFrame :1)当前帧与最近的KeyFrame的视差超过某阈值,2)跟踪质量下降时(match少于一定阈值)。
1.2 IMU数据的处理
IMU数据主要通过预积分的方式来表示,预积分最早是在欧拉角上做参数化,Scaramuzza组的预积分paper[8]对其做了较为完整的扩展,在流行空间进行参数化并且增加后验IMU偏置校正, 这篇工作虽然15年才出来,但是可能都是大家非常熟悉的经典paper,其内容和补充材料的公式推导都非常的详细。接着还是简单梳理一下VIN-Mono中的预积分的应用。
IMU的原始加速度和角速度测量值
给定连续两帧image的时刻
IMU状态传递需要坐标系body系
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 540
540











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









