






 本文介绍了如何使用KUKA机器人的offset指令来实现一点画圆和方。通过示例代码详细展示了画圆和方的编程方法,并提供了KUKA机器人在不同场景的应用技巧。
本文介绍了如何使用KUKA机器人的offset指令来实现一点画圆和方。通过示例代码详细展示了画圆和方的编程方法,并提供了KUKA机器人在不同场景的应用技巧。
想知道多更多资料请关注东莞机器人之家公众号。

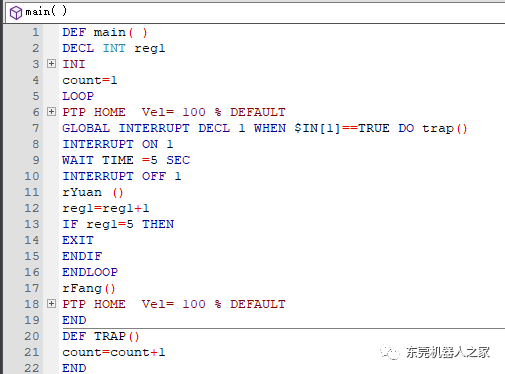
很多读者经常问KUKA机器人有没有和ABB机器人功能指令类似的offs偏移指令?答案是肯定可以实现的。接下来小编分享KUKA机器人用赋值偏移指令一点画圆和方的秘密。
DEF main( )
DECL INT reg1
INI
count=1
LOOP
PTP HOME Vel= 100 % DEFAULT
GLOBAL INTERRUPT DECL 1 WHEN $IN[1]==TRUE DO trap()
INTERRUPT ON 1
WAIT TIME =5 SEC
INTERRUPT OFF 1
rYuan ()
reg1=reg1+1
IF reg1=5 THEN
EXIT
ENDIF
ENDLOOP
rFang()
PTP HOME Vel= 100 % DEFAULT
END
_______________________________________________________________
DEF TRAP()
count=count+1
END
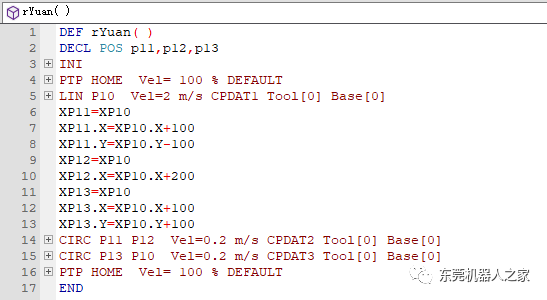
DEF rYuan( )
DECL POS p11,p12,p13
INI
PTP HOME Vel= 100 % DEFAULT
LIN P10 Vel=0.2 m/s CPDAT2 Tool[0] Base[0]
XP11=XP10
XP11.X=XP10.X+100
XP11.Y=XP10.Y-100
XP12=XP10
XP12.X=XP10.X+200
XP13=XP10
XP13.X=XP10.X+100
XP13.Y=XP10.Y+100
CIRC P11 P12 Vel=0.2 m/s CPDAT2 Tool[0] Base[0]
CIRC P13 P10 Vel=0.2 m/s CPDAT2 Tool[0] Base[0]
PTP HOME Vel= 100 % DEFAULT
END
DEF rFang( )
DECL INT i
PTP HOME Vel= 100 % DEFAULT
FOR i=1 TO 6 STEP 1
LIN P10 Vel=2 m/s CPDAT1 Tool[0] Base[0]
XP11=XP10
XP11.X=XP10.X+100
XP11.Y=XP10.Y-100
XP12=XP10
XP12.X=XP10.X+200
XP13=XP10
XP13.X=XP10.X+100
XP13.Y=XP10.Y+100
LIN P11 Vel=0.2 m/s CPDAT4 Tool[0] Base[0]
LIN P12 Vel=0.2 m/s CPDAT5 Tool[0] Base[0]
LIN P13 Vel=0.2 m/s CPDAT5 Tool[0] Base[0]
ENDFOR
PTP HOME Vel= 100 % DEFAULT
END
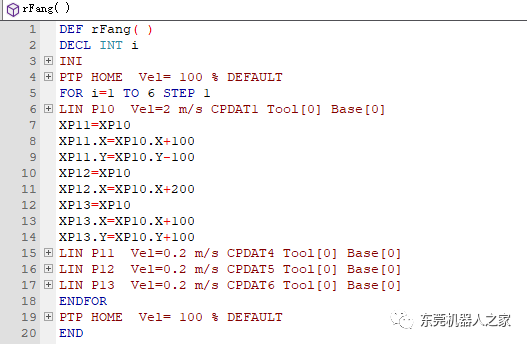
大家在首次编写的过程中难免会遇到各种问题,欢迎大家留言咨询!
KUKA机器人通过 cell.src 来外部调用并启动机器人程序
KUKA机器人如何更改软件限位开关
解密KUKA 标准函数提示信息方面的编程(一)
ABB机器人校原点步骤
KUKA机器人Windows 用户登录界面系统密码解密
揭秘KUKA机器人基坐标系的创建

















 2255
2255

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









