






第31讲 非线性自治方程组
Non-linear Autonomous Systems
网易公开课open.163.com
一个一阶微分方程组为:
本课我们将指出这些问题的方向,并以单摆为例来阐释其中的道理。

例:刚性连接的单摆沿着一个圆形轨道来回摆动,单摆和垂线的角度记为
简写为
无法求解析解,而应用无穷级数等方法也得不到精确解,应用计算机也是通过数值法来处理这个方程,而计算机应用各种改进型欧拉法时需要将方程化作一阶方程组。本例中方程可变为
分析该方程:
1,分析方程组的临界点,即使得
本例中,临界点方程为
2,对于每一个临界点,在该点附近对方程线性化,来近似非线性方程。
我们在(0,0)点附近线性化方程,得到
过(1,0)点方程貌似是,算错了不要怪我。
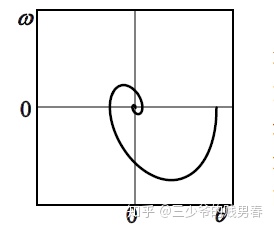
它对应的物理过程就是,我们从角度为1而角速度为0的状态释放,角度减小角速度增大,穿过角度0点,角速度开始变小,直到角度到达反方向最大点,而此时角速度为0随后反向,过程不断重复,角速度能达到的极值点每个周期都在变小,所能达到的角度也在变小。
在第二个临界点(π,0)处线性化方程,我们无法应用在(0,0)点附近的近似时
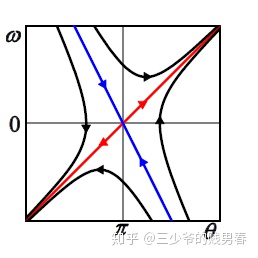
平移到(π,0)点为中心进行绘图,则在(1,1)方向的直线上是远离(π,0)点,在(1,-2)的方向上是进入该点,因此这是一个“鞍”形。从略小于π的一个角度,角速度为0点出发,则角度减小,并且速率大幅变化。从略大于π的一个角度,角速度为0点出发,则角度增大,并且速度也正向大幅变化。
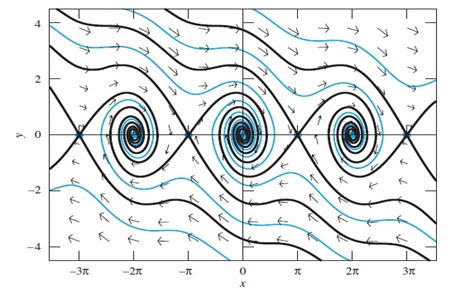
3,绘制大图。画出每个临界点周围的轨迹,补充一些内容。本例中在周期为2π的情况下,图形是重复的。在两种临界点之间按照趋势填充曲线,注意不可能在很近的范围内出现方向向量反向的状态。从角度为零出发,如果角速度很大,则不会朝向(0,0)点发展,可能是在(π,0)附近被弹出去,然后向着(2π,0)的方向发展,最后停止在那里。对应的物理状态就是旋转一圈然后在0点附近振荡停止。这就是其它临界点的意义所在。
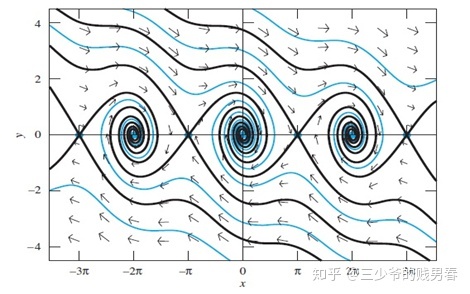
大图实在难画,抠了一个过来,大家感受一下吧。















 6017
6017











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









