






本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/48466543 未经博主允许不得转载。
博主地址是:http://blog.csdn.net/freewebsys
1,关于Lubuntu
Lubuntu是Ubuntu快速、轻量级且节省能源的变体,它使用LXDE(Lightweight X11 Desktop Environment)桌面。它旨在面向低资源配置系统,并被主要设计用于上网本、移动设备和老旧个人电脑。
因为FirePrime开发板上面的系统式Lubuntu,所以尝试使用这个操作系统上跑ROS。
关于FirePrime:http://blog.csdn.net/freewebsys/article/details/48296345
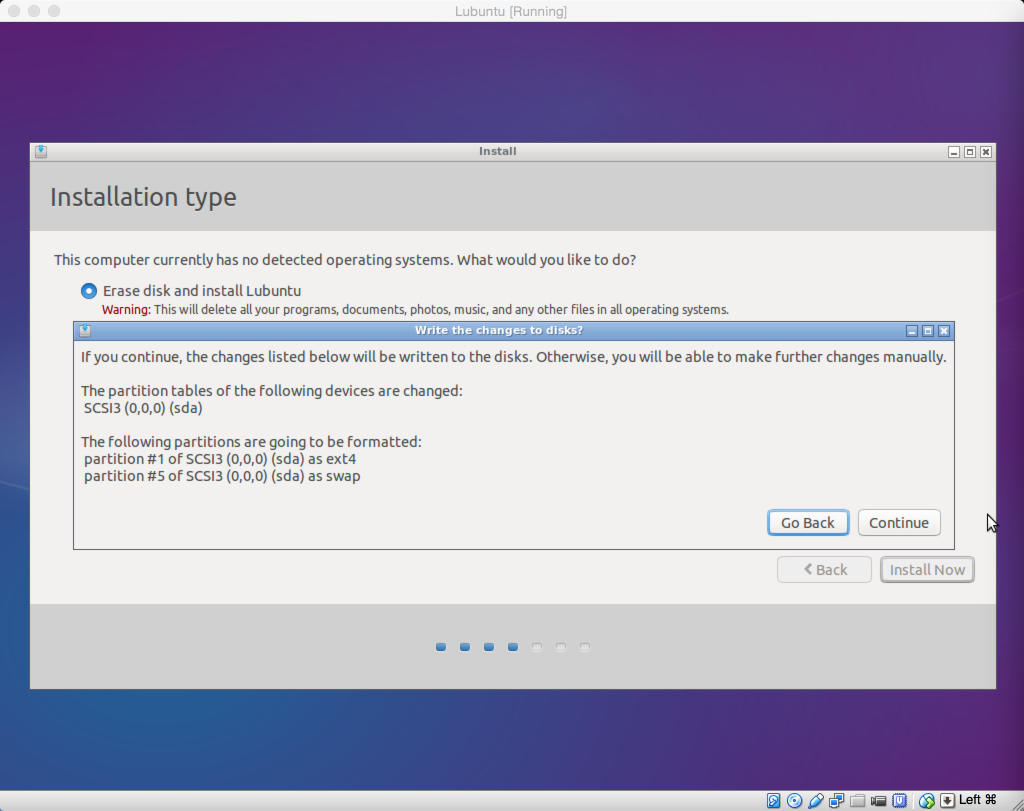
2,virtualbox安装Lubuntu
因为ROS本身也不小,所以磁盘设置成动态的,分配30G。
首先安装ssh服务:

sudo apt-get install openssh-server参考安装:http://wiki.ros.org/jade/Installation/Ubuntu
安装ros。
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 0xB01FA116
sudo apt-get update
sudo apt-get install ros-jade-desktop-full这里有个技巧,使用站长之家的超级ping。
http://ping.chinaz.com/
解析出packages.ros.org的域名,ip配置host。就只有这一个可以使用。
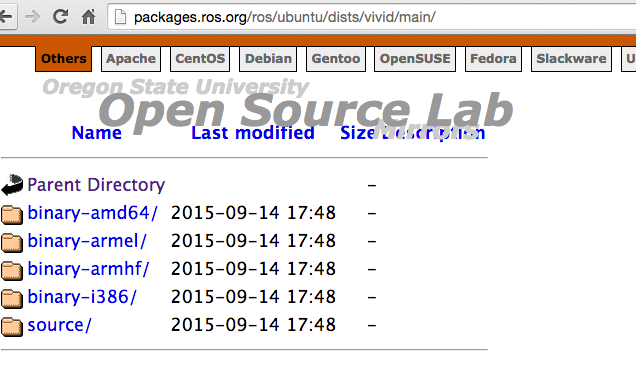
64.50.233.100 packages.ros.org使用这个地址,支持amd64,i386和arm的pkg包。
http://packages.ros.org/ros/ubuntu/dists/vivid/main/
也就是说FirePrime上面可以直接安装。
需要的磁盘空间是1546MB。所以磁盘要设置大点。
安装完成之后设置环境变量:
source /opt/ros/jade/setup.sh
将命令放到/etc/profile,开机启动。
#启动ros,roscore
roscore3,安装rviz
参考之前的文章:
http://blog.csdn.net/freewebsys/article/details/48379697
需要设置下环境变量再启动:
#设置变量
export LIBGL_ALWAYS_SOFTWARE=1
#启动即可
rosrun rviz rviz非常费cpu呢,界面很慢,估计arm上是跑不起来了。
4,总结
本文的原文连接是: http://blog.csdn.net/freewebsys/article/details/48466543 未经博主允许不得转载。
博主地址是:http://blog.csdn.net/freewebsys
Lubuntu是资源消耗非常低的ubuntu系统。同时也证明了。ROS可以在Lubuntu 15.04上面正常使用。
也知道了Lubuntu的arm版本也可以使用ROS。















 976
976











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









