







 本文介绍了如何利用UP-Debugger多功能调试器和Robot Servo Terminal软件进行舵机测试与参数设置。详细步骤包括调试器的驱动安装、硬件连接、舵机ID修改,以及舵机的性能检测。在测试过程中,强调了舵机ID的独特性、通信连接的端口确认、舵机查找和ID修改等关键环节,并提供了舵机模式和电动机模式的调试方法。
本文介绍了如何利用UP-Debugger多功能调试器和Robot Servo Terminal软件进行舵机测试与参数设置。详细步骤包括调试器的驱动安装、硬件连接、舵机ID修改,以及舵机的性能检测。在测试过程中,强调了舵机ID的独特性、通信连接的端口确认、舵机查找和ID修改等关键环节,并提供了舵机模式和电动机模式的调试方法。
本节书摘来异步社区《机器人构建实战》一书中的第2章,第2.2节,作者:丘柳东 ,王牛 ,李瑞峰 ,陈阳,更多章节内容可以访问云栖社区“异步社区”公众号查看。
2.2 利用舵机专用测试软件测试舵机及进行参数设置
博创提供了舵机的专用测试软件——Robot Servo Terminal,该软件的使用有以下几个步骤。
① Robot Servo Terminal软件安装。
② UP-Debugger多功能调试器的驱动安装。
③ UP-Debugger多功能调试器的硬件连接及设置。
④ 搜索已连接的舵机与舵机性能测试。
⑤ 舵机ID的修改。
在完成步骤①和②后,以后的舵机测试及参数设计可以从步骤③开始。Robot Servo Terminal软件的安装与一般软件安装没有区别,这里不再赘述。
Robot Servo Terminal软件默认是英文界面,如果使用中文界面,关闭软件后,打开软件的安装目录,删除EnDll.dll文件,再次打开软件时则变成中文界面。
本书中使用的Robot Servo Terminal软件均采用英文界面。
2.2.1 UP-Debugger多功能调试器的驱动安装
UP-Debugger多功能调试器是CDS5516舵机的主要调试硬件。相对于其他的调试方式,通过调试器和Robot Servo Terminal可以调试和设置更多的舵机参数,以判断舵机的局部或总体性能。
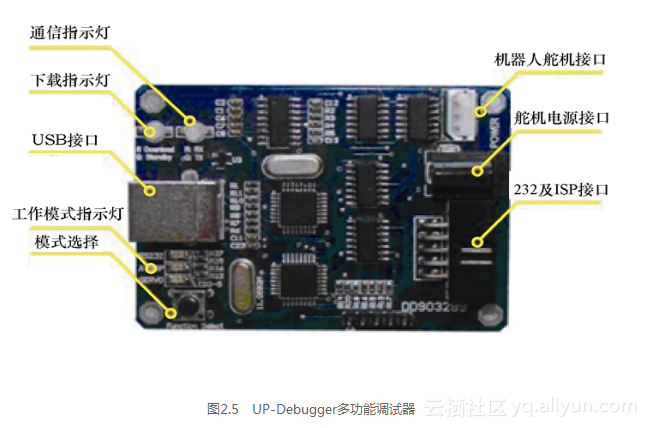
图2.5显示了UP-Debugger多功能调试器进行舵机调试时所需的接口、指示、设置部件,通过模式选择按钮可以将调试器的工作模式在RS232、AVRISP、SERVO之间相互切换。调试舵机时,需要通过模式选择按钮将功能切换到SERVO模式。
在安装驱动程序之前,需要用数据线(见图2.6)将调试器与计算机进行连接。如果是WIN7 32位和WIN XP操作系统,在数据线连接成功后,会自动弹出对话框进行安装驱动提示。用户可以通过制定路径来安装驱动。安装过程如下。

① 在界面选择“否、暂时不”,单击“下一步”按钮。
② 在新弹出的界面选择“从列表或制定位置安装(高级)”,单击“下一步”按钮。
③ 在弹出的对话框中找到驱动程序的文件夹,单击“确定”按钮开始安装驱动。
驱动安装成功后会在设备管理器中出现这个调试器的端口号。打开设备管
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









